このページの目次
ショップ
取扱説明書
製品概要
マイクロコントローラを使用した実験を一通り行ったら、次は何か面白いもの、動くものを作りたくなりますね。その代表格がロボットだと思います。ロボットを制御するためには、RCサーボやDCモータを使用することが一般的です。ESP32-ROBOはそのようなロボットを開発するための開発ボードとして設計されました。MCUとしてESP32を使用しているため、WiFiで無線操作できるロボットの開発も容易です。
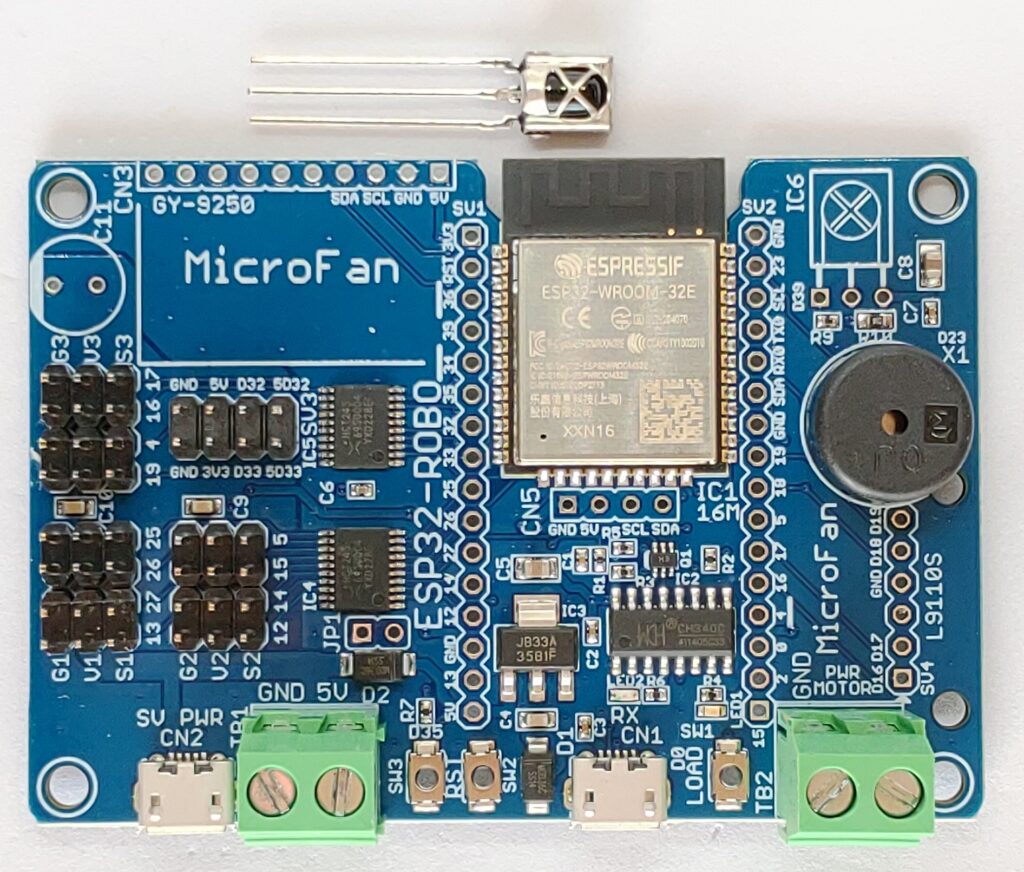
ESP32-ROBOの特徴
ESP32-ROBOは以下のような特徴を持っています。
- ESP32Eの16M Flash 版を搭載しています。
- ネットワークと接続するためのWiFi やBluetooth のネットワーク機能を利用できます。
- RCサーボモータを12個接続できる端子を搭載しています。
- DCモータを2個接続できるL9110ドライバを接続できる端子を装備しています。
- 圧電スピーカ、LED、スイッチを搭載しています。
- OLEDディスプレイを接続できる端子を装備しています。
- 加速度・ジャイロセンサーを接続できる端子を装備しています。
- 赤外線リモコンの受信機能を装備しています。
- MicroPythonやArduinoでプログラミングを楽しむことができます。
- ESP32-ROBOの機能を効果的に利用できるように構成された専用のMicroPythonファームウェアを利用できます。
独り言
ESP32-ROBOは無線操作できる多脚戦車を手軽に作成できることを秘密の目標として開発しました。。。
タチコマ...じゃないや、多脚戦車を作ろうとすると以下のような制御が手軽にできるコントローラが欲しいと思いました。
- 4本の足をそれぞれ2つのRCサーボで制御
- 足のうち2本にタイヤ走行ができるようにそれぞれ1つのDCモーターで駆動
- 2本の腕をそれぞれ2つのRCサーボで制御
ESP32-ROBOは上記の要求にこたえられるよう、12個のRCサーボと2個のDCモーターを制御できる開発ボードとなっています。
ちなみに、まだ多脚戦車は完成していません。。。
まずは3Dプリンタで4脚のボディーを印刷してRCサーボを組み込んで動かしたけど、スマートに歩かせるのは難しいねえ。。。
MICROPYTHONでのプログラミング
ESP32-ROBOの機能を最大限に発揮できるように構成されたMicroPythonファームウェアをご利用いただけます。以下のページからダウンロードしてご利用ください。
MicroPython用のプログラミング環境はいくつかありますが、定評のあるThonnyの使用法を紹介します。
ESP32-ROBOのMicroPythonでのプログラミング情報を以下に示します。
Microdotを使用したWEBサーバーの構築法を紹介します。スマートフォンなどからロボットを制御できるようになります。
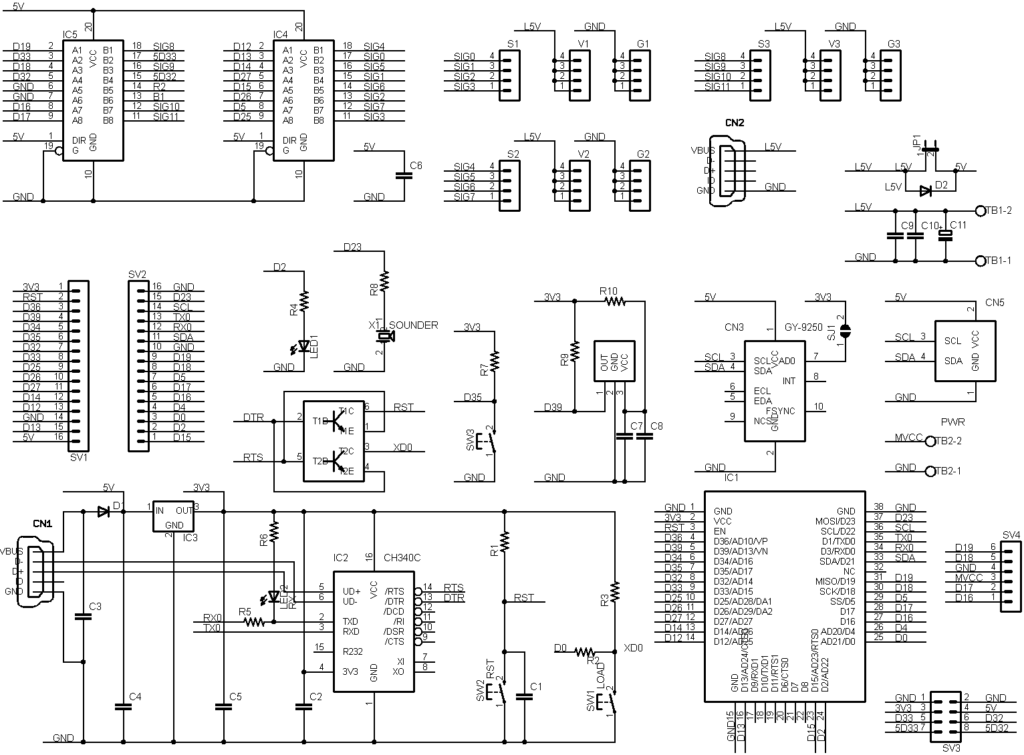
回路図
関連製品
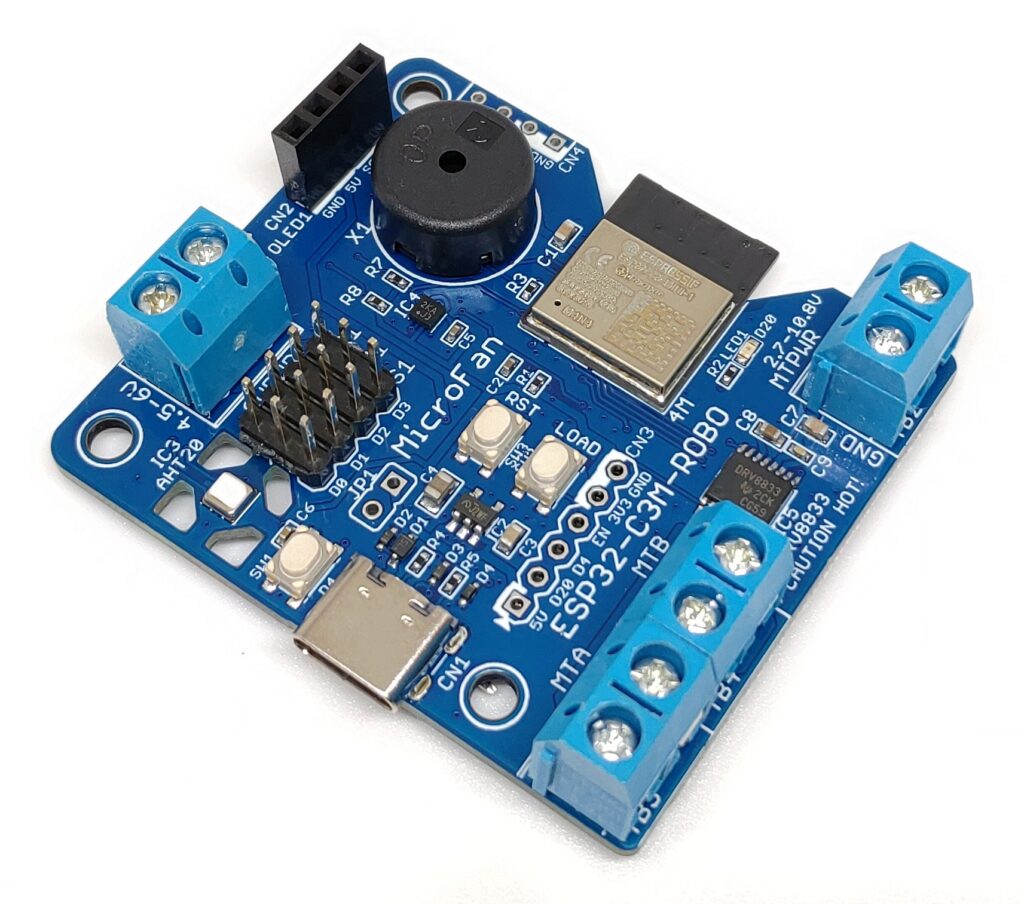
ESP32-C3M-ROBO
コンパクトな一方で、DCモータードライバや、加速度センサーを標準で搭載しているESP32-CM3-ROBOもご検討ください。