ショップ
取扱説明書
製品概要
マイクロコントローラを使用した実験を一通り行ったら、次は何か面白いもの、動くものを作りたくなりますね。その代表格がロボットだと思います。ロボットを制御するためには、RCサーボやDCモータを使用することが一般的です。ESP32C3M-ROBOはそのようなロボットを開発するための開発ボードとして設計されました。また、ESP32はWiFiやBluetoothでネットワークに接続することができるので、遠隔制御できるロボットを作成することもできます。
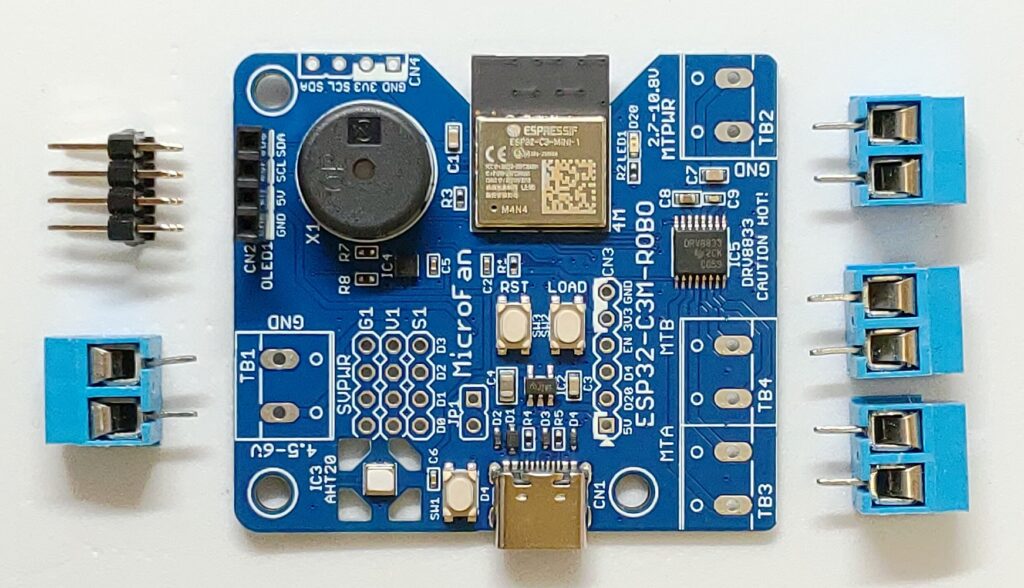
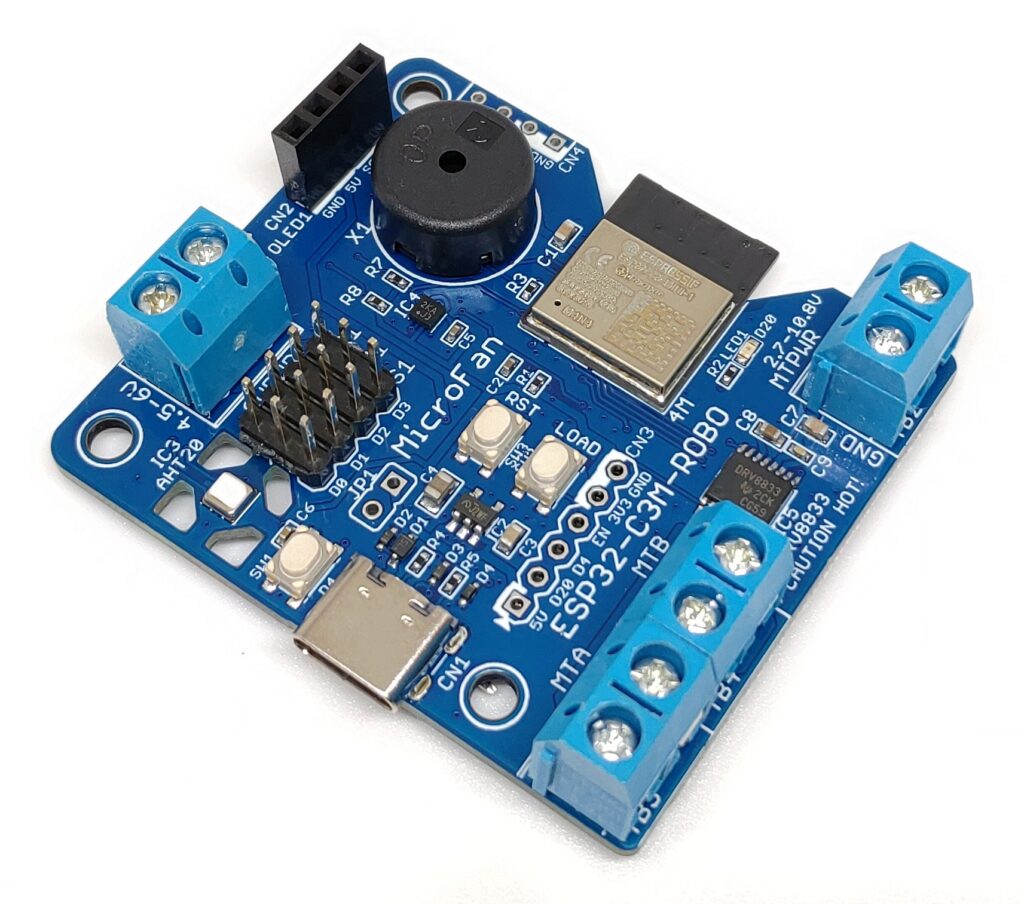
ESP32-C3M-ROBOの特徴
ESP32-C3M-ROBOは以下のような特徴を持っています。
- ESP32-C3-MINI-1を搭載しています。
- ネットワークと接続するためのWiFi やBluetooth のネットワーク機能を利用できます。
- 4個のRCサーボモーターを接続して制御することができます。
- 2個のDCモーターを接続して正転・逆転・速度制御することができます。
- ロボットなどの姿勢を取得するために役立つ加速度センサーを装備しています。
- 環境情報に対応した動作ができるように、温度・湿度センサーを装備しています。
- 圧電スピーカーを装備しています。
- ロボットの状態表示やロボットからのメッセージを表示できるようにOLEDの接続端子を装備しています。
- 2個の端子(内1つはADC端子として利用可能)を外部装置との接続制御用に利用できます。RCサーボの接続数が少ない場合には、RCサーボ制御用の端子も外部装置との接続制御用に利用できます。
- ESP32-C3M-ROBOに接続されたRCサーボやDCモータや、ESP32-C3M-ROBOに搭載された入出力やセンサーをすぐに利用できるように最適化されたMicroPythonファームウェアを利用できます。
- 電子工作で広く利用されているArduino などの無償、便利、高機能な開発環境を利用してソフトウェアを開発できます。
DCモータ制御に使用しているDRV8833とその周辺は使用状況により大変熱くなりますのでご注意ください。
ターミナルブロックとピンヘッダーは、必要に応じてご自身ではんだ付けしてください。
MICROPYTHONでのプログラミング
ESP32-ROBOの機能を最大限に発揮できるように構成されたMicroPythonファームウェアをご利用いただけます。以下のページからダウンロードしてご利用ください。
MicroPython用のプログラミング環境はいくつかありますが、定評のあるThonnyの使用法を紹介します。
Microdotを使用したWEBサーバーの構築法を紹介します。スマートフォンなどからロボットを制御できるようになります。
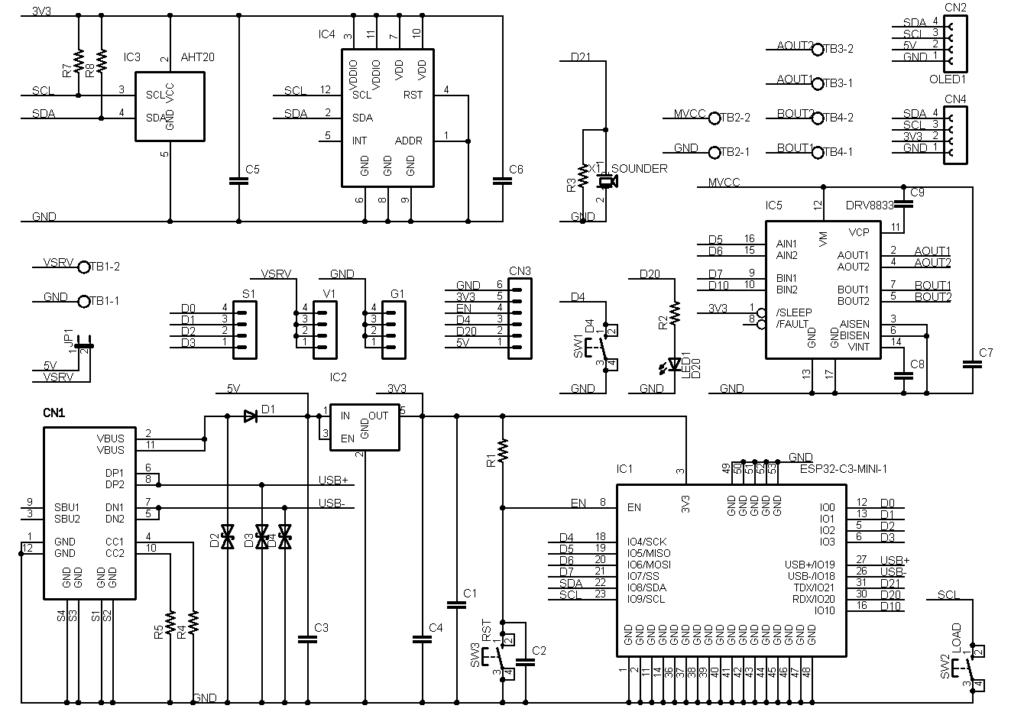
回路図
関連製品
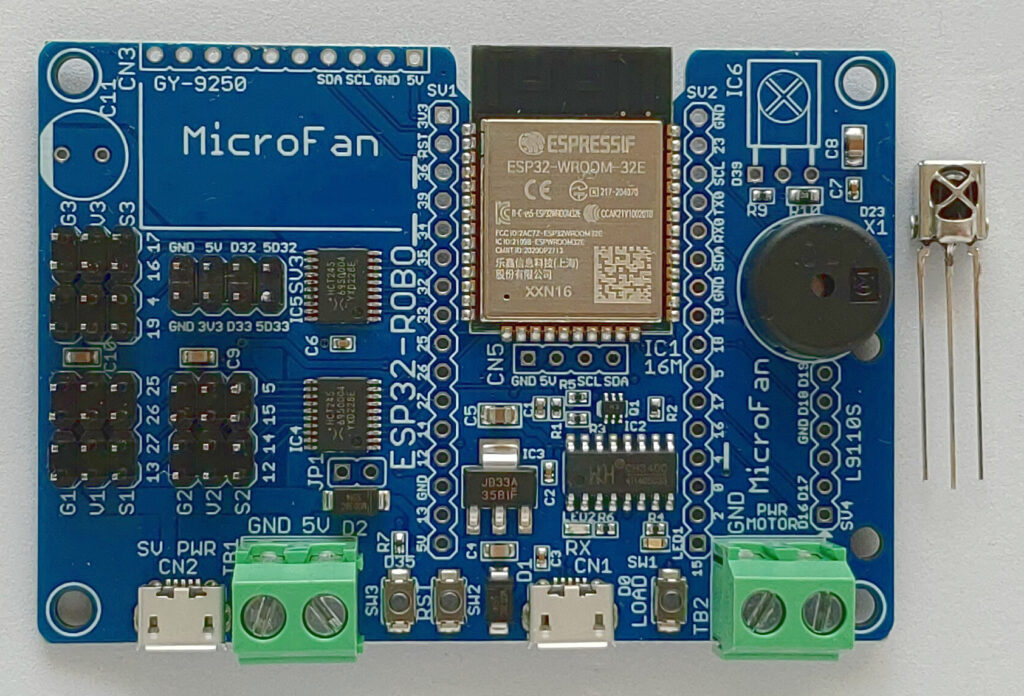
ESP32-ROBO
多くのRCサーボを制御したい場合にはESP32-ROBOをご検討ください。