このページの目次
- 1 AIによるサンプルプログラム
- 2 プログラミングの準備
- 2.1 手順: CircuitPythonファームウェアの書き込み
- 2.2 注意事項
- 2.3 リセットボタンを使用してブートローダーモードに移行する方法
- 2.4 注意点
- 2.5 おすすめのIDEとエディタ
- 2.6 選択のポイント
- 2.7 Thonnyのインストール手順
- 2.8 LinuxでのThonnyインストール方法
- 2.9 Thonnyを使うメリット
- 2.10 1. プログラムの作成
- 2.11 2. プログラムの実行
- 2.12 3. デバッグ方法
- 2.13 4. ヒントと便利機能
- 2.14 補足情報
- 2.15 CircuitPythonでREPLを利用する方法
- 2.16 ThonnyでのREPL活用
- 2.17 メリット
- 2.18 注意点
- 3 スイッチとLEDの利用
- 4 MICROSDカードの利用
- 5 TFTディスプレイ
- 6 RCサーボ
- 7 USBデバイスの作成
- 8 音の出力
- 8.1 プログラムコード
- 8.2 プログラムの説明
- 8.3 プログラムコード
- 8.4 プログラムの説明
- 8.5 結果
- 8.6 修正版プログラム
- 8.7 変更点の説明
- 8.8 スピーカーの接続
- 8.9 結果
- 8.10 修正版プログラム
- 8.11 変更点の説明
- 8.12 スピーカーの接続
- 8.13 動作の結果
- 8.14 プログラムコード
- 8.15 プログラムの説明
- 8.16 接続方法
- 8.17 修正版プログラム
- 8.18 変更点の説明
- 8.19 動作の結果
- 8.20 修正版プログラム
- 8.21 プログラムの説明
- 8.22 接続方法
- 8.23 修正版プログラム
- 8.24 修正点の説明
- 8.25 動作の結果
- 8.26 キラキラ星のプログラムコード
- 8.27 説明
- 9 I2Cとセンサー
AIによるサンプルプログラム
このページでは、WindowsのCopilot(無料AI)を使用してRP2040-UNO-R2用のサンプルプログラムを作成しています。プログラムは全て、カッコ内に書かれている人からの指示(プロンプト)に基づきCopilotによって作成されたもので、1行も人の手によって書かれていません。
作成されたプログラムが不適切な場合や改良の余地がある場合の修正も、プログラムを直接書き換えるのではなく、プロンプトによる指示でCopilotによって再出力させています。
Copilotが出力した説明などにはわかりにくい部分もあるようですが、そのような部分に関しては、Copilotや使い慣れたAIに質問して問題や疑問を解消していってください。
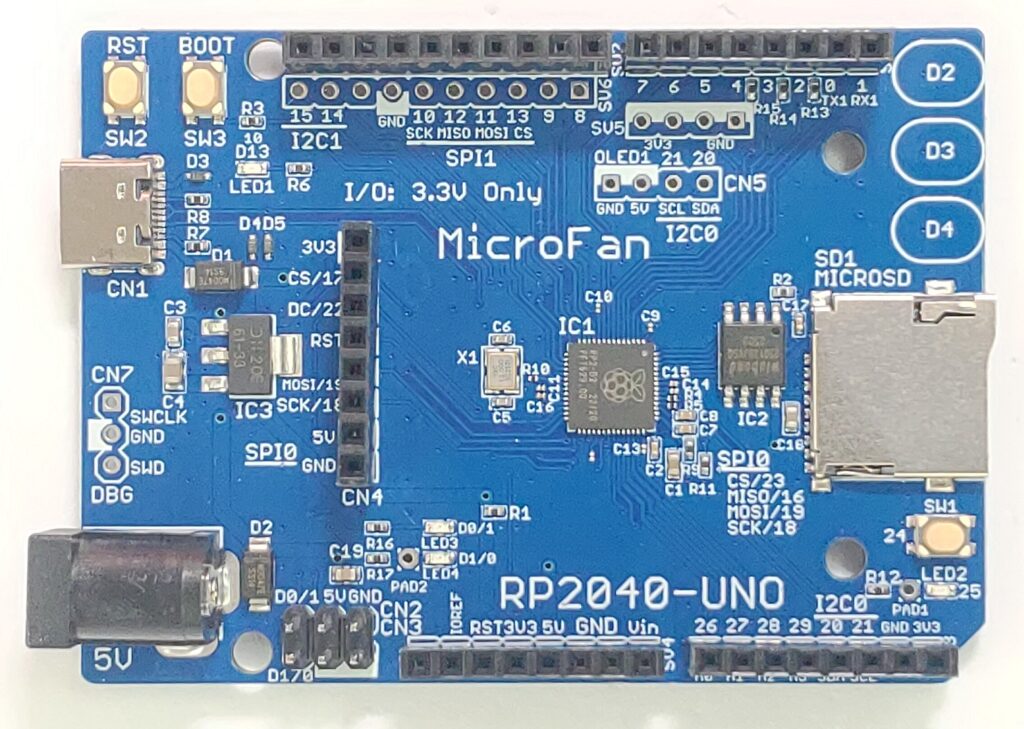
プログラミングの準備
PICOの上位互換機(RP2040-UNO-R2)で、CircuitPythonを使用したプログラミングを行いたい。まず開発ボードにCircuitPythonのファームウェアを書き込む方法を詳細に教えて。RP2040-UNO-R2にCircuitPythonのファームウェアを書き込む方法は以下の手順で行えます。これにより、開発ボードをCircuitPythonでプログラミングできる環境に設定できます。
手順: CircuitPythonファームウェアの書き込み
- CircuitPythonのファームウェアをダウンロード:
- CircuitPythonの公式サイトからRP2040用の
.uf2ファイルをダウンロードします。 - RP2040-UNO-R2はRP2040を搭載しているため、Raspberry Pi Pico用のファームウェアが使用可能です。
- 開発ボードをブートローダーモードにする:
- RP2040-UNO-R2のBOOTボタンを押しながら、USBケーブルをPCに接続します。
- BOOTボタンを押し続けると、PCに「RPI-RP2」という名前のドライブが表示されます。
- ファームウェアを書き込む:
- ダウンロードした
.uf2ファイルを「RPI-RP2」ドライブにドラッグ&ドロップします。 - 書き込みが完了すると、「RPI-RP2」ドライブが消え、新たに「CIRCUITPY」という名前のドライブが表示されます。
- ライブラリの準備:
- AdafruitのCircuitPythonライブラリバンドルをダウンロードし、必要なモジュールを「CIRCUITPY」ドライブにコピーします。
- 例えば、
libフォルダ内にadafruit_display_shapesやadafruit_st7789などのモジュールを追加します。
- プログラミング環境のセットアップ:
- CircuitPythonでプログラミングするために、Thonny IDEをインストールします。
- Thonnyの右下で「CircuitPython (generic)」を選択し、RP2040-UNO-R2を認識させます。
注意事項
- USBケーブルの種類:
- データ転送が可能なUSBケーブルを使用してください(充電専用ケーブルでは動作しません)。
- ファームウェアの更新:
- CircuitPythonの新しいバージョンがリリースされた場合、同じ手順で更新できます。
- エラーが発生した場合:
- BOOTボタンを押しながらRESETボタンを押すことで、再度ブートローダーモードに入れます。
これでRP2040-UNO-R2にCircuitPythonをインストールし、プログラミングを開始する準備が整います!
RP2040-UNO-R2にはリセットボタンもついている。リセットボタンを使用して、ブートローダーモードに移行する方法は?RP2040-UNO-R2にリセットボタンが付いている場合、それを使ってブートローダーモードに入る手順は以下のようになります。
リセットボタンを使用してブートローダーモードに移行する方法
- 準備:
- 開発ボードをUSBケーブルでPCに接続します(まだ電源を入れない状態)。
- BOOTボタンを押す:
- BOOTボタンを押し続けます。このボタンはRP2040のフラッシュメモリの書き込みモードを開始するためのキーです。
- RESETボタンを押してリセット:
- BOOTボタンを押したまま、RESETボタンを短く押し、すぐに放します。
- RESETボタンを離した後も、BOOTボタンは引き続き押したままにしてください。
- ブートローダーモードへの移行:
- 数秒間待つと、PCがボードを「RPI-RP2」ドライブとして認識します。
- これがブートローダーモードであることを確認します。
- BOOTボタンを放す:
- 「RPI-RP2」ドライブが表示されたら、BOOTボタンを放します。
- ファームウェアの書き込み:
- ダウンロードしたCircuitPythonの
.uf2ファイルを「RPI-RP2」ドライブにドラッグ&ドロップします。 - 書き込みが完了すると、「RPI-RP2」が自動的に「CIRCUITPY」に切り替わります。
注意点
- 適切なファームウェアの選択:
- RP2040用のCircuitPythonファームウェアを公式サイトからダウンロードしてください。
- RP2040-UNO-R2では、Raspberry Pi Pico用のファームウェアが使用できます。
- リセットのタイミング:
- BOOTボタンを押している間にRESETボタンを短く押す必要があります。RESETが正しく行われないと通常モードに戻るため、慎重に操作してください。
- USBケーブルの確認:
- 必ずデータ通信対応のUSBケーブルを使用してください。充電専用ケーブルでは動作しません。
この方法でリセットボタンとBOOTボタンを利用して簡単にブートローダーモードに移行できます!手順が分かりづらい場合や他にサポートが必要な場合は、気軽にお知らせください。✨💡
CircuitPythonの公式サイトを教えて。PICO用のファームウェアをダウンロードできるページを教えて。ライブラリバンドルをダウンロードできるページを教えて。ちなみに、現時点で最新のファームウェアやライブラリバンドルの名前を教えて。以下にご希望の情報をまとめました:
- CircuitPython公式サイト:
- CircuitPythonの公式サイトはこちらです。
- PICO用ファームウェアのダウンロードページ:
- Raspberry Pi Pico用のCircuitPythonファームウェアはこちらからダウンロードできます。
- ライブラリバンドルのダウンロードページ:
- CircuitPythonライブラリバンドルはこちらで入手可能です。
- 最新のファームウェアとライブラリバンドルの名前:
- 最新のCircuitPythonファームウェアは「CircuitPython 9.x.x」シリーズです。
- 最新のライブラリバンドルは「adafruit-circuitpython-bundle-9.x-mpy-20250319.zip」です。
これで必要な情報が揃ったと思います!さらにサポートが必要な場合は教えてくださいね✨💡
CircuitPythonのプログラミングを便利で効率よく行えるIDEやエディタがあれば、いくつか教えて。CircuitPythonのプログラミングを効率よく行うために、以下のIDEやエディタが推奨されています:
- Mu Editor:
- CircuitPython専用に設計されたシンプルで使いやすいエディタ。
- シリアルコンソールが内蔵されており、デバッグが簡単。
- 初心者にもおすすめです。
- Thonny:
- Pythonプログラミングに特化した軽量なIDE。
- CircuitPythonのボードを簡単に認識し、コードの編集と実行が可能。
- Visual Studio Code (VS Code):
- 拡張機能を追加することでCircuitPythonに対応。
- 高度な機能を備えたプロフェッショナル向けのエディタ。
- CircuitPython拡張機能をインストールすることで、ライブラリ管理やシリアルモニタが利用可能。
- Sublime Text:
- 高速で軽量なテキストエディタ。
- CircuitPythonのコード編集に適しており、カスタマイズ性が高い。
- Atom:
- 拡張機能を追加することでCircuitPythonに対応。
- シンプルで使いやすいインターフェース。
これらのエディタは、CircuitPythonのコードを効率的に編集し、デバッグするために役立ちます。特に初心者にはMu EditorやThonnyが使いやすく、プロフェッショナルにはVS Codeが人気です。
詳細な情報はこちらやこちらで確認できます。どれを選ぶか迷った場合は、使用目的やスキルレベルに応じてアドバイスしますので、ぜひ教えてください!✨💡
CircuitPythonの他にMicroPythonを使用することも考えているが、どのDE,エディタがお勧めですか?MicroPythonを使用する際に便利で効率的なIDEやエディタをいくつかご紹介します。これらは、MicroPythonのプログラミングをスムーズに進めるために役立ちます。
おすすめのIDEとエディタ
- Thonny:
- 初心者に最適な軽量IDE。
- MicroPythonボードを簡単に認識し、コードの編集や実行が可能。
- シリアルコンソールが内蔵されており、デバッグが簡単。
- Mu Editor:
- MicroPythonに特化したシンプルなエディタ。
- ESP32やESP8266、Raspberry Pi Picoなどのボードで動作。
- ファームウェアの書き込みやコードのアップロードが簡単。
- uPyCraft IDE:
- MicroPython専用に設計されたIDE。
- シンプルなインターフェースで、コードの編集、アップロード、デバッグが可能。
- ESP32やESP8266などのボードで特に人気。
- Visual Studio Code (VS Code):
- 拡張機能(例: Pymakr)を追加することでMicroPythonに対応。
- 高度な機能を備えたプロフェッショナル向けのエディタ。
- プロジェクト管理やデバッグ機能が充実。
- PyCharm:
- Python開発に特化した強力なIDE。
- MicroPython用のプラグインをインストールすることで対応可能。
- 大規模なプロジェクトや高度なデバッグに適している。
- Atom:
- 拡張機能を追加することでMicroPythonに対応。
- シンプルでカスタマイズ性が高い。
選択のポイント
- 初心者向け:
- ThonnyやMu Editorは、シンプルで使いやすく、MicroPythonの学習を始めるのに最適です。
- プロフェッショナル向け:
- VS CodeやPyCharmは、拡張性や高度な機能を求める開発者におすすめです。
- 特定のボード向け:
- uPyCraft IDEはESP32やESP8266などのボードで特に便利です。
どのエディタを選ぶか迷った場合や、特定のボードやプロジェクトに適したツールを知りたい場合は、ぜひ教えてください!✨💡
それでは、最初に挙げられているThonnyをインストールする方法を教えて。以下は、Thonnyをインストールする手順です。Thonnyは、MicroPythonやCircuitPythonの開発に最適な軽量IDEで、初心者でも簡単に使えるのが特徴です。
Thonnyのインストール手順
1. Thonny公式サイトにアクセス
- Thonnyの公式サイト:https://thonny.org/
- このページでは、使用しているOS(Windows、macOS、Linux)に応じたダウンロードオプションが表示されます。
2. Thonnyをダウンロード
- Windows:
- 「Windows installer」リンクをクリックして、インストーラー(.exeファイル)をダウンロード。
- macOS:
- 「Mac」リンクをクリックし、macOS用のインストーラー(.dmgファイル)をダウンロード。
- Linux:
- Linuxでは、
aptやパッケージマネージャを使用してインストール可能(後述します)。
- Linuxでは、
3. ダウンロードしたファイルを実行
- ダウンロードが完了したら、インストーラーを実行します。
- 指示に従ってインストールを完了させます。
4. Thonnyの初回セットアップ
- インストール完了後、Thonnyを起動します。
- 初回起動時に、Python環境を選択する画面が表示されます。CircuitPythonやMicroPythonを使用する場合、後で設定を変更できます。
5. CircuitPythonまたはMicroPythonの設定
- 右下にある「Python環境」ドロップダウンをクリック。
CircuitPythonまたはMicroPython (Raspberry Pi Pico)を選択します。- ボードをPCに接続すると、Thonnyが自動的に認識します。
LinuxでのThonnyインストール方法
Debian/Ubuntu系:
sudo apt update
sudo apt install thonny他のディストリビューション:
- パッケージマネージャ(例:
dnf,pacmanなど)を利用してインストールするか、公式サイトからインストール用ファイルをダウンロードしてください。
Thonnyを使うメリット
- 簡単な設定: CircuitPythonやMicroPythonボードをすぐにセットアップ可能。
- デバッグ機能: シリアルコンソールが統合されており、コードの実行結果やエラーの確認がしやすい。
- 直感的なインターフェース: プログラミング初心者にも扱いやすい設計。
これでThonnyを使ったMicroPythonやCircuitPythonの開発を始められるようになります!設定や操作に関してさらに知りたいことがあれば、お気軽にお知らせください✨💡
Thonnyを利用したCircuitPythonのプログラミングの作成、実行、あればデバッグ法などを教えて。以下は、Thonnyを利用してCircuitPythonでプログラミングを作成・実行・デバッグする流れをわかりやすくまとめたガイドです:
1. プログラムの作成
- Thonnyを起動:
- Thonnyを起動し、右下の「Python環境」で「CircuitPython (generic)」を選択します。
- RP2040-UNO-R2や他のCircuitPython対応ボードをPCに接続すると、自動的に認識されます。
- 新しいファイルを作成:
- メニューの「ファイル」→「新規作成」を選択し、コードを記述する空白のエディタを開きます。
- CircuitPythonコードを書く:
- 必要なライブラリをインポートし、コードを記述します。以下は例としてLED点灯プログラムを作成するコードです:
import board
import digitalio
import time
led = digitalio.DigitalInOut(board.GP25)
led.direction = digitalio.Direction.OUTPUT
while True:
led.value = True # LEDをオン
time.sleep(1) # 1秒間待機
led.value = False # LEDをオフ
time.sleep(1) # 1秒間待機- ファイルを保存:
- 必ず「CIRCUITPY」ドライブ内にファイルを保存してください。
- 保存時のファイル名は
code.pyまたはmain.pyにします。これらの名前のファイルは自動的にボード上で実行されます。
2. プログラムの実行
- 自動実行:
code.pyまたはmain.pyが保存されると、CircuitPythonはすぐに再起動し、ファイルを実行します。- Thonnyのシリアルコンソールウィンドウで動作状況を確認できます。
- 手動での実行:
- ファイルを別名で保存した場合、Thonny内で「再生ボタン」を押すことでプログラムを実行できます。
3. デバッグ方法
- シリアルコンソールの利用:
- CircuitPythonの標準機能として、
print()を利用してデバッグ情報を出力できます。 - シリアルコンソールにはコードの結果やエラーメッセージが表示されるので、動作確認に役立てられます。
- 例:
print("プログラム開始")
led.value = True
print("LEDがオンになりました")- エラーの解析:
- エラーメッセージが表示された場合、その内容を読み取って修正ポイントを特定します。
- Thonnyのシリアルコンソールにはエラーの種類と行番号が表示されます。
- ステップ実行:
- Thonnyのデバッグ機能を使うことでコードを1ステップずつ実行して状態を確認できます。
- メニューの「デバッグ」からステップ実行を選択し、変数の状態をチェックすることが可能です。
- 必要なライブラリがない場合の対応:
- 「CIRCUITPY」ドライブ内の
libフォルダに不足しているライブラリをコピーします。 - 必要なライブラリをAdafruitのCircuitPythonライブラリバンドルからダウンロードして追加してください。
4. ヒントと便利機能
- 自動保存と実行:
- Thonnyを使うと、ファイルを保存するだけでCircuitPythonのボードが即座に再起動し、コードが実行されます。
- 外部ファイルの読み書き:
- CircuitPythonでは、SDカードや内部ストレージにファイルを保存してデータを扱うことができます。
- ライブラリ管理:
- Thonnyでコード編集の途中に必要なライブラリが判明した場合、その場で追加して即座に活用できます。
これで、Thonnyを使用したCircuitPythonのプログラミングが効率的に進められるはずです!さらに具体的な例や疑問点があれば、いつでも聞いてくださいね✨💡
Thonnyでは、エディタで作成したプログラムをファイルに保存しないと実行できないの。また、ファイル名は、code.pyかmain.pyでなくてはならないの?ファイルを保存する「CIRCUITPY」ドライブというのは、開発ボードのフラッシュのことですか?- プログラムをファイルに保存しないと実行できないか:
- Thonnyでは、作成したプログラムを必ずファイルに保存しなくても実行可能です。エディタでコードを書き終えたら、「再生ボタン」をクリックするだけで、コードを実行できます。
- ただし、CircuitPythonで自動実行をしたい場合は、コードを
CIRCUITPYドライブに保存しないとボード上で動作しません。
- ファイル名について:
- CircuitPythonでボードを自動実行させる場合は、ファイル名を
code.pyまたはmain.pyにする必要があります。この名前が保存されたコードは、ボードがリセット(または再起動)された際に自動的に実行されるルールがあります。 - 他のファイル名(例:
test.pyなど)でも保存して実行できますが、その場合は手動でThonnyを使って実行する必要があります。
- 「CIRCUITPY」ドライブについて:
- 「CIRCUITPY」ドライブは、開発ボードに搭載されたフラッシュメモリです。CircuitPythonがインストールされると、このフラッシュメモリがPCにUSBストレージとして認識され、「CIRCUITPY」という名前のドライブとして表示されます。
- このドライブは、コードやライブラリを保存するためのスペースとして利用されます。
補足情報
- Thonny内でコードを即時実行する場合、ファイル保存は不要ですが、保存しておけばボードが再接続・リセットされても自動的に動作を開始します。
CIRCUITPYドライブが認識されない場合、CircuitPythonのファームウェアが正しくインストールされているか確認する必要があります。
これで理解が深まったと思います!さらに質問や具体例が必要なら教えてくださいね✨💡
Pythonはプログラムが出来上がっていなくても、部分部分で対話的に実行できるが、CircuitPythonやThonnyでもできるの?Pythonの対話型実行環境(REPL)を活用すると、プログラムが完成していなくても、部分部分でコードを実行したりテストしたりできます。そして、CircuitPythonでもREPL(Read-Eval-Print Loop)を利用して同様の操作が可能です。Thonnyを使うと、その機能をさらに簡単に使えるようになります。
CircuitPythonでREPLを利用する方法
- 開発ボードをPCに接続:
- ボードをPCに接続し、「CIRCUITPY」ドライブが認識されていることを確認します。
- Thonnyのシリアルコンソールを開く:
- Thonnyを起動し、右下の「Python環境」で「CircuitPython」を選択します。
- シリアルコンソール(画面下部)が表示されるので、その中で対話的にコマンドを入力します。
- 対話的な実行:
- シリアルコンソールに直接Pythonのコードを入力して実行できます。
- 例えば:
>>> import board
>>> print(board.GP25)- リアルタイムでの確認:
- REPLを使うとリアルタイムでコードの結果が確認できるため、例えばライブラリのインポートや変数の値の確認、関数の実行などが部分的に可能です。
ThonnyでのREPL活用
ThonnyはREPLを使いやすいインターフェースで提供しています。以下の方法でCircuitPythonのREPLを効率的に活用できます:
- シリアルコンソールを活用:
- Thonnyのシリアルコンソール(下部ウィンドウ)は、REPLと同じ機能を持っています。
- インポートや変数の値を確認する簡単なコマンドを入力できます。
- 対話型コードのテスト:
- プログラム全体を保存せずに、部分的なコードをシリアルコンソールで直接実行して動作確認ができます。
- コードの断片を逐次実行:
- エディタで書いたコードの特定部分をコピーして、シリアルコンソールに貼り付けることで実行できます。
メリット
- 効率的なデバッグ:
- 完全なプログラムを組む前に、モジュールや関数を逐次テストして動作を確認できます。
- 学習と実験:
- Pythonコードの基本的な動作を実験するのに最適です。
注意点
- REPLで実行したコードは、一時的なものなので、ボードがリセットされると失われます。保存したコードは、リセット後も保持されて実行されます。
CircuitPythonとThonnyを組み合わせれば、Pythonのように対話型でコードの部分的なテストが簡単にできます。さらに具体例や応用の方法を知りたい場合は教えてください!✨💡
スイッチとLEDの利用
GP2,GP3,GP4がタッチセンサーになっている。GP24はスイッチになっているが、外部のプルアップはついていない。GP2,GP3,GP4,GP24を押すと、それぞれGP0,GP1,GP10,GP25に接続されているLEDを点灯させるプログラムを作れ。以下は、指定された条件を満たすCircuitPythonのプログラム例です。GP2, GP3, GP4がタッチセンサーとして使用され、GP24がスイッチとして動作します。それぞれの入力が押されると対応するLEDを点灯するように設計されています。
プログラム例
import board
import digitalio
import touchio
import time
# タッチセンサー(GP2, GP3, GP4)の設定
touch_sensor_1 = touchio.TouchIn(board.GP2)
touch_sensor_2 = touchio.TouchIn(board.GP3)
touch_sensor_3 = touchio.TouchIn(board.GP4)
# スイッチ(GP24)の設定
switch = digitalio.DigitalInOut(board.GP24)
switch.direction = digitalio.Direction.INPUT
switch.pull = digitalio.Pull.UP # 内部プルアップ抵抗を有効化
# LED(GP0, GP1, GP10, GP25)の設定
led_1 = digitalio.DigitalInOut(board.GP0)
led_1.direction = digitalio.Direction.OUTPUT
led_2 = digitalio.DigitalInOut(board.GP1)
led_2.direction = digitalio.Direction.OUTPUT
led_3 = digitalio.DigitalInOut(board.GP10)
led_3.direction = digitalio.Direction.OUTPUT
led_4 = digitalio.DigitalInOut(board.GP25)
led_4.direction = digitalio.Direction.OUTPUT
# メインループ
while True:
# タッチセンサーが押された場合
led_1.value = touch_sensor_1.value # GP2 → GP0のLED
led_2.value = touch_sensor_2.value # GP3 → GP1のLED
led_3.value = touch_sensor_3.value # GP4 → GP10のLED
# スイッチが押された場合
led_4.value = not switch.value # GP24 → GP25のLED(プルアップのため値を反転)
time.sleep(0.1) # 少し待機してセンサーの反応を安定化コードのポイント
- タッチセンサー:
TouchInクラスを使用してタッチセンサー(GP2, GP3, GP4)を設定しています。- 押された場合は
valueがTrueになります。
- スイッチのプルアップ設定:
- GP24は外部プルアップ抵抗がないため、
digitalio.Pull.UPで内部プルアップを有効化しました。 - 押された場合はスイッチの
valueがFalseになるため、LED制御では値を反転しています。
- LEDの制御:
- タッチセンサーやスイッチが押されると対応するLEDの値を切り替えて点灯させます。
- 待機時間:
time.sleep(0.1)でループを短時間待機させ、センサーの反応を安定化します。
注意事項
- 電圧と配線:
- タッチセンサーやスイッチ、LEDが正しい電圧範囲内で動作していることを確認してください。
- センサー感度:
- タッチセンサーの感度が高すぎる場合は、環境要因で誤検知が起きる可能性があります。
これで複数のセンサーやスイッチを使ったインタラクティブなプログラムを動かすことができます!
MICROSDカードの利用
MICROSDソケットが装備されており、MISO=GP16,MOSI=GP19,SCK=GP18,CS=GP23となっている。ソケットに挿入されたMICROSDに記録されたファイル一覧を出力するプログラムを作れ。以下は、Raspberry Pi PicoでCircuitPythonを使用し、MicroSDソケット(MISO=GP16, MOSI=GP19, SCK=GP18, CS=GP23)に接続されたMicroSDカードからファイル一覧を取得して出力するプログラム例です。
プログラム例
import board
import busio
import digitalio
import storage
import sdcardio
import os
# SPIバスとCSピンの設定
spi = busio.SPI(clock=board.GP18, MOSI=board.GP19, MISO=board.GP16)
cs = digitalio.DigitalInOut(board.GP23)
# SDカードの初期化
sd = sdcardio.SDCard(spi, cs)
vfs = storage.VfsFat(sd)
storage.mount(vfs, "/sd")
# SDカードのルートディレクトリのファイル一覧を取得
print("MicroSDカード内のファイル一覧:")
for file in os.listdir("/sd"):
print(f"- {file}")コードのポイント
- SPIバスの初期化:
busio.SPIでSPI通信を初期化し、MicroSDカードと接続します。- MISO, MOSI, SCK, CSの各ピンは質問の指定に基づいて設定されています。
- MicroSDカードの接続:
sdcardio.SDCardを使用してSDカードと通信を開始します。storage.VfsFatを使用して、FAT形式のファイルシステムをマウントします。
- ファイル一覧の取得:
os.listdir("/sd")でSDカードのルートディレクトリにあるファイルやフォルダを取得します。
- 出力:
- ファイル名をループで一覧表示します。
セットアップ手順
- ライブラリのインストール:
- CircuitPython用の
sdcardioとstorageモジュールを使用するため、AdafruitのCircuitPythonライブラリバンドルから必要なモジュールをダウンロードしてPicoにコピーしてください。
- 配線確認:
- ピン配置が正しく、MicroSDソケットとRaspberry Pi Picoが接続されていることを確認します。
- GP18: SCK
- GP19: MOSI
- GP16: MISO
- GP23: CS
- SDカードのフォーマット:
- SDカードはFAT32またはFAT16でフォーマットされている必要があります。
- コード保存:
- 上記コードを
code.pyとして保存し、Picoにコピーします。
実行結果例
SDカードに次のようなファイルが保存されている場合:
/sd/
- log.txt
- data.csv
- images/プログラムの実行結果:
MicroSDカード内のファイル一覧:
- log.txt
- data.csv
- images注意点
- SDカードの互換性:
- 使用するSDカードがFATフォーマットであることを確認してください。
- 大容量SDカード(例: 64GB以上)はFAT32に対応しているか確認してください。
- 接続確認:
- 配線が正しく行われていない場合、SDカードが認識されないことがあります。
- エラー処理:
- 実運用では、例外処理(try-except)を追加して、SDカードのマウント失敗やファイル操作エラーに対応することをお勧めします。
これでMicroSDカード内のファイル一覧を取得する準備が整いました!
csの指定形式が間違っている。誤りを説明し修正して。ご指摘ありがとうございます!先ほどのコードのcs(チップセレクト)の指定形式に誤りがありましたので、訂正と説明を行います。
誤りの内容
以下の行でcsをdigitalio.DigitalInOutで宣言しましたが、これはチップセレクトピンとして利用するには不適切です:
cs = digitalio.DigitalInOut(board.GP23)理由: sdcardio.SDCardは、チップセレクトピンを直接board.GP23のようにPinオブジェクトで指定する必要があります。digitalio.DigitalInOutはGPIOピンの入出力設定に使用されますが、sdcardioライブラリではCSピンを制御する役割がライブラリ内部で処理されるため、余分な設定は不要です。
修正後のコード
以下のように修正します:
import board
import busio
import storage
import sdcardio
import os
# SPIバスとCSピンの設定
spi = busio.SPI(clock=board.GP18, MOSI=board.GP19, MISO=board.GP16)
cs = board.GP23 # 修正: digitalio.DigitalInOutではなく、直接ピンを指定
# SDカードの初期化
sd = sdcardio.SDCard(spi, cs)
vfs = storage.VfsFat(sd)
storage.mount(vfs, "/sd")
# SDカードのルートディレクトリのファイル一覧を取得
print("MicroSDカード内のファイル一覧:")
for file in os.listdir("/sd"):
print(f"- {file}")修正ポイント
- チップセレクトピンの指定:
- 修正後の
csでは、board.GP23を直接指定しています。 sdcardio.SDCardは内部でチップセレクトの制御を行うため、追加の設定は不要です。
- 不要なオーバーヘッドの排除:
digitalio.DigitalInOutで余計なGPIO設定を行わないことでコードを簡素化し、誤解を避けます。
期待される動作
修正後のコードは、正しくMicroSDソケットを制御し、SDカード内のファイル一覧を取得するはずです。
TFTディスプレイ
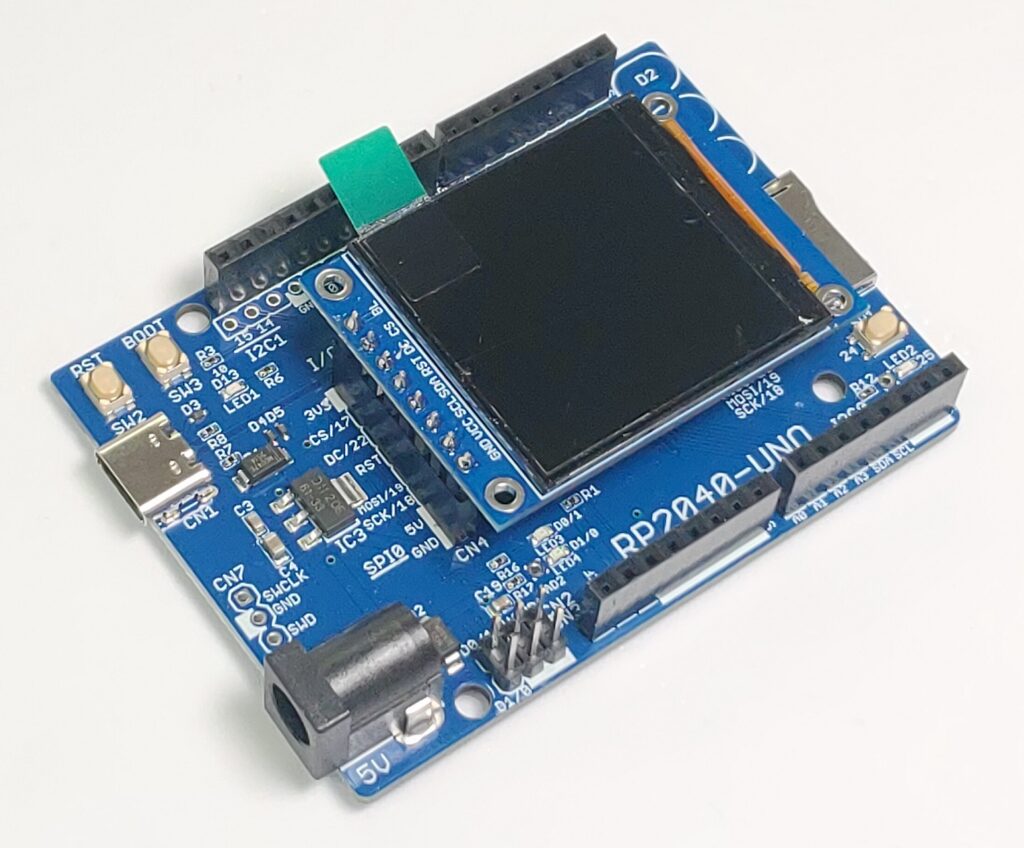
RP2040-UNO-R2ではCN4にTFTディスプレイを接続できます。CN4にST7789コントローラを使用したTFTディスプレイを接続したプログラム例を示します。
TFTディスプレイを使用する。端子の接続はMOSI=GP19,SCK=GP18,CS=GP17,DC=GP22となっている。TFTディスプレイのコントローラーはST7789で、240x240ピクセル。MicroFan,RP2040-UNO-R2,CircuitPythonの3つの文字列と、円、四角、三角形の図形を色と配置をいい感じにアレンジして表示するプログラムを作って。以下は、Raspberry Pi PicoでST7789コントローラーを搭載したTFTディスプレイに文字列と図形を表示するCircuitPythonプログラムの例です。ご指定いただいた端子(MOSI=GP19、SCK=GP18、CS=GP17、DC=GP22)に基づいて作成しました。
プログラム例
import board
import busio
import displayio
import terminalio
from adafruit_st7789 import ST7789
from adafruit_display_text import label
from adafruit_display_shapes.circle import Circle
from adafruit_display_shapes.rect import Rect
from adafruit_display_shapes.triangle import Triangle
# 以前のディスプレイリソースを解放
displayio.release_displays()
# SPIバスとピンの設定
spi = busio.SPI(clock=board.GP18, MOSI=board.GP19)
cs_pin = board.GP17 # チップセレクトピン
dc_pin = board.GP22 # データ/コマンドピン
# ディスプレイの初期化
display_bus = displayio.FourWire(spi, command=dc_pin, chip_select=cs_pin)
display = ST7789(display_bus, width=240, height=240, rotation=0)
# メインの表示グループを作成
main_group = displayio.Group()
# 背景を黒に設定
background = Rect(0, 0, 240, 240, fill=0x000000) # 全体を黒背景に設定
main_group.append(background)
# 図形の表示
# 円(黄色)
circle = Circle(180, 50, 30, fill=0xFFFF00) # 中心座標(180,50), 半径30
main_group.append(circle)
# 四角形(シアン)
rectangle = Rect(100, 120, 60, 60, fill=0x00FFFF) # 左上座標(100,120), 幅60, 高さ60
main_group.append(rectangle)
# 三角形(マゼンタ)
triangle = Triangle(40, 200, 80, 240, 0, 240, fill=0xFF00FF) # 3頂点を指定
main_group.append(triangle)
# 文字列の表示
text_microfan = label.Label(terminalio.FONT, text="MicroFan", color=0xFF0000, x=20, y=30) # 赤文字
text_rp2040 = label.Label(terminalio.FONT, text="RP2040-UNO-R2", color=0x00FF00, x=20, y=90) # 緑文字
text_circuitpython = label.Label(terminalio.FONT, text="CircuitPython", color=0x0000FF, x=20, y=150) # 青文字
main_group.append(text_microfan)
main_group.append(text_rp2040)
main_group.append(text_circuitpython)
# ディスプレイに描画
display.root_group = main_group
# 無限ループで画面を維持
while True:
passプログラムのポイント
- 文字列表示:
- 3つの文字列を異なる色と配置で表示しています。
label.Labelクラスを使用して色や座標を指定しています。
- 図形の描画:
- 図形には
adafruit_display_shapesライブラリを使用しています。 - 円 (
Circle)、四角形 (Rect)、三角形 (Triangle) をそれぞれ配置しました。
- 背景設定:
- 背景は
Rectクラスを使って黒色にしています。
- SPI通信の初期化:
busio.SPIとdisplayio.FourWireを利用し、MOSI, SCK, CS, DCを適切に初期化しています。
必要な準備
- CircuitPythonライブラリのインストール:
- Adafruitライブラリバンドルから以下のモジュールをPicoにコピーしてください:
adafruit_st7789adafruit_display_textadafruit_display_shapes
- ディスプレイの配線:
- ご指定のピン(MOSI=GP19、SCK=GP18、CS=GP17、DC=GP22)に従って正しく接続してください。
- 電源供給:
- ディスプレイに3.3Vまたは5Vの電源を供給してください。
期待される結果
- 文字列: 画面上に3つのカラフルな文字列(赤、緑、青)が表示されます。
- 図形: 黄色い円、シアンの四角形、マゼンタの三角形が画面に配置されます。
ST7789のrowstartを80にして。画面を反時計回りに90ど回転させて。文字サイズを2倍にして。以下は、ご指定いただいた変更をすべて反映したST7789を使用するプログラムです。
プログラム例:調整内容を反映
import board
import busio
import displayio
import terminalio
from adafruit_st7789 import ST7789
from adafruit_display_text import label
from adafruit_display_shapes.circle import Circle
from adafruit_display_shapes.rect import Rect
from adafruit_display_shapes.triangle import Triangle
# 以前のディスプレイリソースを解放
displayio.release_displays()
# SPIバスとピンの設定
spi = busio.SPI(clock=board.GP18, MOSI=board.GP19)
cs_pin = board.GP17 # チップセレクトピン
dc_pin = board.GP22 # データ/コマンドピン
# ディスプレイの初期化(rowstart=80、rotation=90で反時計回りに90度回転)
display_bus = displayio.FourWire(spi, command=dc_pin, chip_select=cs_pin)
display = ST7789(display_bus, width=240, height=240, rotation=90, rowstart=80)
# メインの表示グループを作成
main_group = displayio.Group()
# 背景を黒に設定
background = Rect(0, 0, 240, 240, fill=0x000000) # 全体を黒背景に設定
main_group.append(background)
# 図形の表示
# 円(黄色)
circle = Circle(180, 50, 30, fill=0xFFFF00) # 中心座標(180,50), 半径30
main_group.append(circle)
# 四角形(シアン)
rectangle = Rect(100, 120, 60, 60, fill=0x00FFFF) # 左上座標(100,120), 幅60, 高さ60
main_group.append(rectangle)
# 三角形(マゼンタ)
triangle = Triangle(40, 200, 80, 240, 0, 240, fill=0xFF00FF) # 三角形の3頂点を指定
main_group.append(triangle)
# 文字列の表示(文字サイズを2倍に設定)
text_microfan = label.Label(terminalio.FONT, text="MicroFan", color=0xFF0000, x=20, y=30, scale=2) # 赤文字
text_rp2040 = label.Label(terminalio.FONT, text="RP2040-UNO-R2", color=0x00FF00, x=20, y=90, scale=2) # 緑文字
text_circuitpython = label.Label(terminalio.FONT, text="CircuitPython", color=0x0000FF, x=20, y=150, scale=2) # 青文字
main_group.append(text_microfan)
main_group.append(text_rp2040)
main_group.append(text_circuitpython)
# ディスプレイに描画
display.root_group = main_group
# 無限ループで画面を維持
while True:
pass調整内容の解説
rowstart=80:
- 描画領域の開始行を80ピクセルに設定しました。これは、特定のディスプレイモジュールの仕様に基づいて調整される値です。
- 画面の反時計回り90度回転:
rotation=90を指定して、全体の描画内容を反時計回りに90度回転しています。
- 文字サイズを2倍に拡大:
scale=2を指定して、文字の大きさを標準の2倍に拡大しました。
必要な準備
- 必要ライブラリ:
adafruit_st7789adafruit_display_textadafruit_display_shapes
- 配線:
- MOSI=GP19、SCK=GP18、CS=GP17、DC=GP22の接続を確認してください。
これで、文字と図形が理想的に配置されたプログラムが動作するはずです。さらに調整や新しい要望があれば、ぜひお知らせください!✨💡
rotationを270にして以下は、画面の回転を270度に設定した修正版のプログラムです。rotation=270を設定することで、画面が反時計回りに270度回転します。
修正版プログラム:画面を270度回転
import board
import busio
import displayio
import terminalio
from adafruit_st7789 import ST7789
from adafruit_display_text import label
from adafruit_display_shapes.circle import Circle
from adafruit_display_shapes.rect import Rect
from adafruit_display_shapes.triangle import Triangle
# 以前のディスプレイリソースを解放
displayio.release_displays()
# SPIバスとピンの設定
spi = busio.SPI(clock=board.GP18, MOSI=board.GP19)
cs_pin = board.GP17 # チップセレクトピン
dc_pin = board.GP22 # データ/コマンドピン
# ディスプレイの初期化(rowstart=80、rotation=270で画面を回転)
display_bus = displayio.FourWire(spi, command=dc_pin, chip_select=cs_pin)
display = ST7789(display_bus, width=240, height=240, rotation=270, rowstart=80)
# メインの表示グループを作成
main_group = displayio.Group()
# 背景を黒に設定
background = Rect(0, 0, 240, 240, fill=0x000000) # 全体を黒背景に設定
main_group.append(background)
# 図形の表示
# 円(黄色)
circle = Circle(180, 50, 30, fill=0xFFFF00) # 中心座標(180,50), 半径30
main_group.append(circle)
# 四角形(シアン)
rectangle = Rect(100, 120, 60, 60, fill=0x00FFFF) # 左上座標(100,120), 幅60, 高さ60
main_group.append(rectangle)
# 三角形(マゼンタ)
triangle = Triangle(40, 200, 80, 240, 0, 240, fill=0xFF00FF) # 三角形の3頂点を指定
main_group.append(triangle)
# 文字列の表示(文字サイズを2倍に設定)
text_microfan = label.Label(terminalio.FONT, text="MicroFan", color=0xFF0000, x=20, y=30, scale=2) # 赤文字
text_rp2040 = label.Label(terminalio.FONT, text="RP2040-UNO-R2", color=0x00FF00, x=20, y=90, scale=2) # 緑文字
text_circuitpython = label.Label(terminalio.FONT, text="CircuitPython", color=0x0000FF, x=20, y=150, scale=2) # 青文字
main_group.append(text_microfan)
main_group.append(text_rp2040)
main_group.append(text_circuitpython)
# ディスプレイに描画
display.root_group = main_group
# 無限ループで画面を維持
while True:
pass変更内容の解説
- 画面回転を270度に設定:
rotation=270を指定し、画面を反時計回りに270度回転しました。これにより、画面の表示が指定された角度で出力されます。
- 他の設定を維持:
rowstart=80を維持することで描画の開始位置を適切に設定しています。- 文字サイズは引き続き
scale=2で2倍に設定しています。
期待される表示結果
- 画面全体が270度回転して表示されます。
- 図形と文字が新しい回転角度に合わせて正しい位置に表示されます。
rowstartの機能と使い方を詳しく説明して。関連する引数があればそれも。rowstartは、AdafruitのCircuitPythonライブラリ内のST7789クラスで使用される引数で、TFTディスプレイの描画開始位置を指定するために使います。この引数は、ディスプレイのハードウェア設定に応じて画面内で描画内容を適切な位置に調整するために重要です。
rowstartの機能
- 描画領域のオフセット指定:
rowstartは、ディスプレイの行(垂直方向)の開始位置を指定します。- 一部のST7789ディスプレイは、物理的なピクセル配置と表示可能領域に差異がある場合があるため、
rowstartでその差を埋めます。
- ディスプレイのアライメント補正:
- ディスプレイモジュールごとにハードウェア仕様が異なり、初期設定で描画内容が画面の中央に正しく配置されない場合があります。この時に
rowstartで描画内容を補正します。
- オフセット値の変更:
- 値を変更することで、表示エリアを上下に移動させ、ディスプレイ全体の適正な領域に内容を収めます。
関連する他の引数
rowstartとともに、以下の引数が描画位置や回転を調整する際に関係します:
colstart
- 列(横方向)の描画開始位置を指定します。
rowstartが垂直方向の調整であるのに対して、colstartは水平方向の描画補正を行います。
rotation
- ディスプレイ全体の回転を指定します。値は以下の4つから選択します:
0: 回転なし(デフォルト設定)。90: 反時計回りに90度回転。180: 反時計回りに180度回転。270: 反時計回りに270度回転。
- 回転設定によって、
rowstartやcolstartの指定が回転後の表示に影響します。
widthとheight
- 描画する画面の幅と高さを指定します。ST7789ディスプレイの場合、通常
width=240、height=240を設定します。
例: rowstartと関連引数の使用
以下は、rowstart=80を指定してディスプレイの描画内容を調整する例です:
import board
import busio
import displayio
from adafruit_st7789 import ST7789
# SPI設定
spi = busio.SPI(clock=board.GP18, MOSI=board.GP19)
cs_pin = board.GP17
dc_pin = board.GP22
# ディスプレイ初期化
display_bus = displayio.FourWire(spi, command=dc_pin, chip_select=cs_pin)
display = ST7789(display_bus, width=240, height=240, rotation=0, rowstart=80, colstart=0)
# 描画グループ
main_group = displayio.Group()
# ディスプレイに設定
display.root_group = main_group調整の実際の使用シーン
- 使用しているディスプレイが
ST7789を搭載していても、製造元やモデルによって物理的なピクセル配置が異なる場合があります。この際、rowstartやcolstartを活用することで、正確な表示を調整できます。 - 例えば、小型のTFTディスプレイ(240x240ピクセル)を使用する場合、
rowstartがデフォルト値(0)のままだと、描画内容が表示位置からずれることがあります。適切な値(例:rowstart=80)を設定することで修正可能です。
RCサーボ
RP2040-UNO-R2には、RCサーボを2個接続できるCN2,CN3端子があります。
GP0(D1)にRCサーボを接続した。GP2,GP3,GP4は、タッチスイッチとなっている。RCサーボは-90度から+90度まで改定するものとする。GP2を押すとプラス方向、GP4を押すとマイナス方向に回転し、GP3を押すと0度の位置に戻るプログラムを作れ。以下に、RP2040とCircuitPythonを使用して、指定された要件に基づくプログラムを記述しました。このプログラムでは、RCサーボがGP0ピンに接続され、タッチスイッチがGP2、GP3、GP4に接続されています。
プログラム
import time
import board
import pwmio
from adafruit_motor import servo
from touchio import TouchIn
# PWMのセットアップ(GP0に接続したサーボ)
pwm = pwmio.PWMOut(board.GP0, duty_cycle=0, frequency=50)
servo_motor = servo.Servo(pwm, min_pulse=500, max_pulse=2500)
# タッチスイッチの設定(GP2, GP3, GP4)
touch_plus = TouchIn(board.GP2) # プラス方向
touch_reset = TouchIn(board.GP3) # 中央位置リセット
touch_minus = TouchIn(board.GP4) # マイナス方向
# 初期位置を0度に設定
angle = 0
servo_motor.angle = angle
print("プログラム開始。サーボの角度を操作してください。")
while True:
if touch_plus.value: # GP2をタッチでプラス方向
if angle < 90: # +90度まで制限
angle += 10
servo_motor.angle = angle
print(f"現在の角度: {angle}度")
time.sleep(0.2) # 過剰検出防止のための遅延
if touch_minus.value: # GP4をタッチでマイナス方向
if angle > -90: # -90度まで制限
angle -= 10
servo_motor.angle = angle
print(f"現在の角度: {angle}度")
time.sleep(0.2) # 過剰検出防止のための遅延
if touch_reset.value: # GP3をタッチで0度にリセット
angle = 0
servo_motor.angle = angle
print("0度にリセットしました")
time.sleep(0.2) # 過剰検出防止のための遅延プログラムの説明
- サーボモーターの制御:
pwmio.PWMOutを使用してGP0ピンでPWM信号を生成します。adafruit_motor.servo.Servoクラスを利用して、RCサーボを-90度から+90度まで回転させます。
- タッチスイッチの検出:
touchio.TouchInクラスを使用し、GP2、GP3、GP4をタッチスイッチとして設定しています。- スイッチが触れられた際に
valueがTrueになります。
- 角度の制御:
- サーボの角度を
angle変数で管理し、タッチスイッチの操作に応じて値を増減させます。 - プラス(GP2)は10度ずつ増加、マイナス(GP4)は10度ずつ減少、リセット(GP3)は0度に設定されます。
- 遅延による過剰検出防止:
- 短い遅延(0.2秒)を挿入することで、タッチが押しっぱなしになった場合の誤作動を防ぎます。
必要な環境
- CircuitPythonライブラリ:
- 必要なモジュール(
adafruit_motor、touchio)をCircuitPythonライブラリバンドルから取得し、「CIRCUITPY」ドライブ内のlibフォルダにコピーしてください。
- ハードウェアの配線:
- RCサーボの制御線をGP0に接続し、電源とGNDを適切に配線します。
- タッチスイッチの信号線をGP2、GP3、GP4に接続します。
これで静電容量式スイッチを使ったRCサーボの操作プログラムが完成です!追加のご要望や調整が必要な場合は、ぜひお知らせください✨💡
Servoクラスのメソッドやプロパティを含むリファレンスを示せ。ServoクラスはAdafruit CircuitPythonのadafruit_motorライブラリに含まれており、RCサーボモーターの制御に使用されます。このクラスでは、サーボを簡単に制御するためのメソッドとプロパティが提供されています。以下にその概要を示します。
Servoクラスの概要
adafruit_motor.servo.Servoクラスは、RCサーボモーターを角度で制御するためのクラスです。
プロパティ
angle
- サーボの現在の角度(0度から180度の範囲)を取得または設定します。
- 値を設定することで、サーボモーターを指定した角度に回転させます。
- 設定例:
python servo.angle = 90 # サーボを90度に設定 print(servo.angle) # 現在の角度を取得
actuation_range
- サーボモーターの動作範囲を設定します(デフォルトは180度)。
- 一部のサーボモーターは0-180度以外の範囲で動作する場合があるため、このプロパティで調整可能です。
- 設定例:
python servo.actuation_range = 90 # 動作範囲を90度に設定
初期化パラメータ
pwm
- サーボ制御用のPWMオブジェクトを指定します。
min_pulse
- サーボモーターの最小パルス幅(デフォルトは500マイクロ秒)。
- 設定例:
python servo = Servo(pwm, min_pulse=600)
max_pulse
- サーボモーターの最大パルス幅(デフォルトは2500マイクロ秒)。
- 設定例:
python servo = Servo(pwm, max_pulse=2400)
使用例
以下は、Servoクラスを使用したシンプルな例です:
import pwmio
import board
from adafruit_motor.servo import Servo
# PWM設定
pwm = pwmio.PWMOut(board.GP0, duty_cycle=0, frequency=50)
servo = Servo(pwm, min_pulse=500, max_pulse=2500)
# サーボを操作
servo.angle = 90 # サーボを90度に設定
print(f"現在の角度: {servo.angle}")
time.sleep(1)
servo.angle = 0 # サーボを0度に設定
print(f"現在の角度: {servo.angle}")
time.sleep(1)公式リファレンスとドキュメント
Servoクラスの詳細な仕様や追加情報は、Adafruit CircuitPythonの公式ドキュメントで確認できます:
Servoクラスの角度指定は、-90から90ではなく、0から180なので、引数値の変換が必要ではないか?また、サーボの角度の増減は2度単位に変えて。その通りです!Servoクラスは角度を0から180度で制御するため、-90から90の範囲をサーボで表現するには変換が必要です。具体的には、-90度を0度に、90度を180度にマッピングします。また、増減を2度単位に変更することも簡単にできます。
以下に修正版のプログラムを示します。
修正版プログラム
import time
import board
import pwmio
from adafruit_motor import servo
from touchio import TouchIn
# PWMのセットアップ(GP0に接続したサーボ)
pwm = pwmio.PWMOut(board.GP0, duty_cycle=0, frequency=50)
servo_motor = servo.Servo(pwm, min_pulse=500, max_pulse=2500)
# タッチスイッチの設定(GP2, GP3, GP4)
touch_plus = TouchIn(board.GP2) # プラス方向
touch_reset = TouchIn(board.GP3) # 中央位置リセット
touch_minus = TouchIn(board.GP4) # マイナス方向
# 初期角度を-90度(変換後の90度)に設定
angle = 0 # -90~90 を扱う内部変数
servo_motor.angle = angle + 90 # -90~90を0~180に変換してセット
print("プログラム開始。サーボの角度を操作してください。")
while True:
if touch_plus.value: # GP2をタッチでプラス方向
if angle < 90: # +90度まで制限
angle += 2
servo_motor.angle = angle + 90 # 変換して設定
print(f"現在の角度: {angle}度(内部値)")
time.sleep(0.2) # 過剰検出防止のための遅延
if touch_minus.value: # GP4をタッチでマイナス方向
if angle > -90: # -90度まで制限
angle -= 2
servo_motor.angle = angle + 90 # 変換して設定
print(f"現在の角度: {angle}度(内部値)")
time.sleep(0.2) # 過剰検出防止のための遅延
if touch_reset.value: # GP3をタッチで0度にリセット
angle = 0
servo_motor.angle = angle + 90 # 変換して設定
print("0度にリセットしました")
time.sleep(0.2) # 過剰検出防止のための遅延変更点の解説
- 角度変換:
- 内部では
-90から90度の値を使います。 - サーボに設定する際に、
0~180度にマッピングするためにangle + 90を適用しています。
- 角度の増減を2度単位に変更:
angleを2ずつ増減するように変更しました。- より細かい制御が可能になります。
- 遅延で安定化:
- タッチスイッチの検出を安定させるため、0.2秒の遅延を加えています。
動作の流れ
- 初期状態ではサーボモーターは
0度(変換後の90度)に設定されています。 - GP2(タッチ)を押すと2度ずつプラス方向に回転します(最大+90度)。
- GP4(タッチ)を押すと2度ずつマイナス方向に回転します(最大-90度)。
- GP3(タッチ)を押すと角度が0度にリセットされます。
この修正版プログラムで、-90度から+90度の範囲でスムーズにサーボを制御できます。さらなるカスタマイズや質問があれば教えてください!✨💡
time.sleep()の引数を0.05に修正して以下は、time.sleep()の遅延時間を0.05秒に変更した修正版プログラムです。
修正版プログラム
import time
import board
import pwmio
from adafruit_motor import servo
from touchio import TouchIn
# PWMのセットアップ(GP0に接続したサーボ)
pwm = pwmio.PWMOut(board.GP0, duty_cycle=0, frequency=50)
servo_motor = servo.Servo(pwm, min_pulse=500, max_pulse=2500)
# タッチスイッチの設定(GP2, GP3, GP4)
touch_plus = TouchIn(board.GP2) # プラス方向
touch_reset = TouchIn(board.GP3) # 中央位置リセット
touch_minus = TouchIn(board.GP4) # マイナス方向
# 初期角度を-90度(変換後の90度)に設定
angle = 0 # -90~90 を扱う内部変数
servo_motor.angle = angle + 90 # -90~90を0~180に変換してセット
print("プログラム開始。サーボの角度を操作してください。")
while True:
if touch_plus.value: # GP2をタッチでプラス方向
if angle < 90: # +90度まで制限
angle += 2
servo_motor.angle = angle + 90 # 変換して設定
print(f"現在の角度: {angle}度(内部値)")
time.sleep(0.05) # 遅延を0.05秒に変更
if touch_minus.value: # GP4をタッチでマイナス方向
if angle > -90: # -90度まで制限
angle -= 2
servo_motor.angle = angle + 90 # 変換して設定
print(f"現在の角度: {angle}度(内部値)")
time.sleep(0.05) # 遅延を0.05秒に変更
if touch_reset.value: # GP3をタッチで0度にリセット
angle = 0
servo_motor.angle = angle + 90 # 変換して設定
print("0度にリセットしました")
time.sleep(0.05) # 遅延を0.05秒に変更変更点の説明
- 遅延時間の変更:
- 各
time.sleep()の遅延を0.05秒に設定しました。これにより、ボタン押下時の応答性が向上します。
- その他の動作を維持:
- 角度の増減を2度単位に変更した部分や
-90~90から0~180への角度変換ロジックはそのままです。
この修正版では、よりリアルタイムに近い動作が可能になります。さらに調整や追加の変更が必要な場合は気軽にお知らせください!✨💡
USBデバイスの作成
RP2040のUSBはどのような機能をプログラミングできるか?例えば、マウスやキーボードを作成できるか?RP2040のUSB機能は非常に柔軟で、デバイスモードとホストモードの両方をサポートしています。これにより、USBを利用したさまざまなデバイスをプログラミングすることが可能です。以下に具体的な機能を示します:
RP2040のUSB機能
- デバイスモード:
- RP2040をUSBデバイスとして動作させることができます。
- HID(Human Interface Device)クラスを使用して、キーボードやマウスを作成することが可能です。
- CDC(Communication Device Class)を利用して、仮想シリアルポートを実現できます。
- ホストモード:
- RP2040をUSBホストとして動作させ、他のUSBデバイス(キーボード、マウス、ゲームパッドなど)を接続して制御できます。
- USBメモリなどのマスストレージデバイスを操作することも可能です。
- TinyUSBライブラリの活用:
- AdafruitのTinyUSBライブラリを使用することで、USB関連のプログラミングが簡単になります。
- HIDクラスを利用して、キーボードやマウスの動作をエミュレートできます。
- PIOを利用したUSB制御:
- RP2040のPIO(Programmable I/O)機能を活用して、USBプロトコルを直接制御することも可能です。
- 高度なカスタマイズが必要な場合に役立ちます。
キーボードやマウスの作成例
RP2040を使用してキーボードやマウスを作成する場合、以下の手順を参考にできます:
- TinyUSBライブラリをインストール:
- CircuitPythonまたはMicroPython環境でTinyUSBライブラリを利用します。
- HIDクラスを設定:
- HIDプロファイルを設定し、キー入力やマウスの動作をプログラムします。
- USBデバイスとして動作:
- RP2040をPCに接続し、USBデバイスとして認識させます。
RP2040のUSB機能を活用すれば、キーボードやマウスだけでなく、ゲームコントローラーやカスタムデバイスの作成も可能です。さらに詳細な情報や具体的なコード例が必要であれば教えてください!✨💡
簡単なキーボードを作成したい。GP2-4はタッチスイッチである。GP2を押すとA、GP2を押すとB、GP3を押すとCを入力する。GP24に接続されている通常のスイッチを押すとバックスペースが入力される。以下は、RP2040とCircuitPythonを使用して、指定された条件で簡単なキーボードを作成するプログラム例です。このプログラムでは、GP2、GP3、GP4のタッチスイッチを使用して文字の入力を行い、GP24の通常のスイッチを押すとバックスペースを入力します。
プログラムコード
import time
import board
from digitalio import DigitalInOut, Direction, Pull
from touchio import TouchIn
import usb_hid
from adafruit_hid.keyboard import Keyboard
from adafruit_hid.keycode import Keycode
# USBキーボードの初期化
kbd = Keyboard(usb_hid.devices)
# タッチスイッチの設定(GP2, GP3, GP4)
touch_a = TouchIn(board.GP2) # Aを入力
touch_b = TouchIn(board.GP3) # Bを入力
touch_c = TouchIn(board.GP4) # Cを入力
# 通常スイッチの設定(GP24)
button_backspace = DigitalInOut(board.GP24)
button_backspace.direction = Direction.INPUT
button_backspace.pull = Pull.DOWN
print("簡単なキーボードを開始します。")
while True:
# GP2がタッチされた場合、Aを入力
if touch_a.value:
kbd.press(Keycode.A)
kbd.release_all() # キーを放す
print("Aが入力されました")
time.sleep(0.2) # 誤入力防止の遅延
# GP3がタッチされた場合、Bを入力
if touch_b.value:
kbd.press(Keycode.B)
kbd.release_all()
print("Bが入力されました")
time.sleep(0.2)
# GP4がタッチされた場合、Cを入力
if touch_c.value:
kbd.press(Keycode.C)
kbd.release_all()
print("Cが入力されました")
time.sleep(0.2)
# GP24が押された場合、バックスペースを入力
if button_backspace.value:
kbd.press(Keycode.BACKSPACE)
kbd.release_all()
print("バックスペースが入力されました")
time.sleep(0.2)プログラムの説明
- USB HIDライブラリの利用:
adafruit_hidライブラリを使用して、RP2040をUSBキーボードとして動作させます。Keyboardクラスを使用して文字入力をエミュレートします。
- タッチスイッチ(GP2, GP3, GP4):
touchio.TouchInクラスでタッチスイッチを読み取ります。- 各タッチスイッチが反応した場合に対応するキー(A, B, C)が入力されます。
- 通常スイッチ(GP24):
- デジタル入力ピンとして設定し、スイッチが押された場合にバックスペースキーを入力します。
- キー入力の仕組み:
kbd.press(Keycode.X)でキーを押し、kbd.release_all()でキーを放します。- これにより、PC側にキー入力が伝わります。
- 遅延の追加:
time.sleep(0.2)で誤作動防止のために短い遅延を加えています。
回路接続
- タッチスイッチ:
- GP2、GP3、GP4にそれぞれ接続。
- 通常スイッチ:
- GP24に接続し、片方をGND、もう片方をピンに接続。
- USB接続:
- RP2040をPCに接続してUSBデバイスとして動作。
必要な設定
- CircuitPythonライブラリ:
- Adafruit HIDライブラリをCircuitPythonライブラリバンドルから取得し、
libフォルダに追加してください。
- コード保存:
- プログラムを
code.pyとして「CIRCUITPY」ドライブに保存します。
このプログラムで指定されたキー入力が可能になります。さらにカスタマイズしたい場合や不明点があれば、ぜひお知らせください!✨💡
GP24はプルアップして以下は、GP24をプルアップに設定した修正版のプログラムです。この変更により、スイッチが押されていない状態ではHIGHとなり、押された際にLOWとなる動作をします。
修正版プログラム
import time
import board
from digitalio import DigitalInOut, Direction, Pull
from touchio import TouchIn
import usb_hid
from adafruit_hid.keyboard import Keyboard
from adafruit_hid.keycode import Keycode
# USBキーボードの初期化
kbd = Keyboard(usb_hid.devices)
# タッチスイッチの設定(GP2, GP3, GP4)
touch_a = TouchIn(board.GP2) # Aを入力
touch_b = TouchIn(board.GP3) # Bを入力
touch_c = TouchIn(board.GP4) # Cを入力
# 通常スイッチの設定(GP24, プルアップを有効化)
button_backspace = DigitalInOut(board.GP24)
button_backspace.direction = Direction.INPUT
button_backspace.pull = Pull.UP # プルアップ設定
print("簡単なキーボードを開始します。")
while True:
# GP2がタッチされた場合、Aを入力
if touch_a.value:
kbd.press(Keycode.A)
kbd.release_all() # キーを放す
print("Aが入力されました")
time.sleep(0.05) # 誤入力防止の遅延
# GP3がタッチされた場合、Bを入力
if touch_b.value:
kbd.press(Keycode.B)
kbd.release_all()
print("Bが入力されました")
time.sleep(0.05)
# GP4がタッチされた場合、Cを入力
if touch_c.value:
kbd.press(Keycode.C)
kbd.release_all()
print("Cが入力されました")
time.sleep(0.05)
# GP24が押された場合(LOWになる)、バックスペースを入力
if not button_backspace.value: # プルアップ設定なので押されるとLOW
kbd.press(Keycode.BACKSPACE)
kbd.release_all()
print("バックスペースが入力されました")
time.sleep(0.05)変更点の説明
- GP24をプルアップに設定:
Pull.UPを使用してプルアップ抵抗を有効化しました。- スイッチが押されていない状態では
button_backspace.valueがTrue(HIGH)になり、押されるとFalse(LOW)になります。
- バックスペース検出条件の変更:
if not button_backspace.valueを使用して、スイッチが押された状態(LOW)を検出するように修正しました。
- 遅延時間の短縮:
time.sleep(0.05)に変更し、ボタン押下後の応答性を改善しています。
回路接続のポイント
- GP24(通常スイッチ):
- 一端をGNDに接続し、もう一端をGP24ピンに接続してください。この構成により、スイッチが押されると信号がLOWになります。
- タッチスイッチ(GP2, GP3, GP4):
- GP2、GP3、GP4に静電容量式スイッチを接続します。
この修正版プログラムでは、GP24の通常スイッチをプルアップで動作させることが可能になりました。さらに調整や追加の機能が必要な場合はぜひ教えてください!✨💡
簡単なマウスを作成したい。GP2-4はタッチスイッチである。GP2を押すとポインタが右に、GP2を押すとポインタが下に、GP3を押すとポインタが画面の左上に移動する。GP24は通常のスイッチでプルアップが必要。GP24を押すと左クリックが実行される。以下は、RP2040とCircuitPythonを使用して簡単なマウスを作成するプログラム例です。このプログラムでは、GP2、GP3、GP4をタッチスイッチ、GP24を通常のスイッチとして使用し、ポインタ操作と左クリックを実現します。
プログラムコード
import time
import board
from digitalio import DigitalInOut, Direction, Pull
from touchio import TouchIn
import usb_hid
from adafruit_hid.mouse import Mouse
# USBマウスの初期化
mouse = Mouse(usb_hid.devices)
# タッチスイッチの設定(GP2, GP3, GP4)
touch_right = TouchIn(board.GP2) # 右に移動
touch_down = TouchIn(board.GP3) # 下に移動
touch_home = TouchIn(board.GP4) # 画面の左上に移動
# 通常スイッチの設定(GP24, プルアップを有効化)
button_click = DigitalInOut(board.GP24)
button_click.direction = Direction.INPUT
button_click.pull = Pull.UP # プルアップ設定
print("簡単なマウスを開始します。")
while True:
# GP2がタッチされた場合、ポインタを右に移動
if touch_right.value:
mouse.move(x=10, y=0) # X方向に+10移動
print("ポインタが右に移動しました")
time.sleep(0.05) # 誤検知防止の遅延
# GP3がタッチされた場合、ポインタを下に移動
if touch_down.value:
mouse.move(x=0, y=10) # Y方向に+10移動
print("ポインタが下に移動しました")
time.sleep(0.05) # 誤検知防止の遅延
# GP4がタッチされた場合、ポインタを画面の左上に移動
if touch_home.value:
mouse.move(x=-10000, y=-10000) # 画面左上に強制移動(仮想的な大きな値)
print("ポインタが画面の左上に移動しました")
time.sleep(0.05)
# GP24が押された場合(LOWになる)、左クリックを実行
if not button_click.value: # プルアップ設定なので押されるとLOW
mouse.click(Mouse.LEFT_BUTTON)
print("左クリックが実行されました")
time.sleep(0.2) # 誤クリック防止のため遅延プログラムの説明
- USB HIDマウス機能:
adafruit_hid.mouse.Mouseクラスを使用して、RP2040をUSBマウスとして動作させます。mouse.move()でポインタを移動し、mouse.click()でマウスクリックをエミュレートします。
- タッチスイッチ(GP2, GP3, GP4):
touchio.TouchInクラスで静電容量式タッチスイッチを読み取ります。- 各スイッチでポインタの移動方向(右、下、左上)を制御します。
- 通常スイッチ(GP24, プルアップ設定):
- プルアップ抵抗を有効化して、スイッチが押された際(LOW)に左クリックを実行します。
- ポインタ移動の制御:
mouse.move(x=, y=)を使用して、ポインタを指定した方向に移動します。- 画面の左上に移動する場合は、大きな負の値(例:
x=-10000, y=-10000)を指定し、仮想的に強制移動します。
- 遅延の追加:
- タッチスイッチや通常スイッチの検出を安定させるため、短い遅延を追加しています。
回路接続
- タッチスイッチ:
- GP2、GP3、GP4に静電容量式スイッチを接続。
- 通常スイッチ:
- GP24に通常スイッチを接続し、一端をGND、もう一端をピンに接続します。
必要なライブラリ
- Adafruit HIDライブラリ:
- CircuitPythonライブラリバンドルから
adafruit_hidを取得し、「CIRCUITPY」ドライブ内のlibフォルダにコピーしてください。
操作方法
- GP2をタッチするとポインタが右に移動します。
- GP3をタッチするとポインタが下に移動します。
- GP4をタッチするとポインタが画面の左上に移動します。
- GP24の通常スイッチを押すと左クリックが実行されます。
これで、簡単なマウスが完成します!さらなる調整や追加機能が必要であれば、ぜひ教えてください✨💡
音の出力
音を出力させるためには、RP2040-UNOにSOUND-PLUSや、SOUND-PLAY-PLUSを接続してください。簡単には、GP26に圧電スピーカを接続してもかまいません。
GP26にスピーカーが接続されいている。440Hzの音を0.5秒間隔でオンオフして。以下は、RP2040のGP26に接続されたスピーカーで440Hzの音を0.5秒間隔でオン・オフするプログラムです。CircuitPythonを使用します。
プログラムコード
import time
import pwmio
import board
# PWMのセットアップ(GP26に接続されたスピーカー)
pwm = pwmio.PWMOut(board.GP26, duty_cycle=0, frequency=440)
print("440Hzの音を0.5秒間隔でオン・オフします。")
while True:
pwm.duty_cycle = 32768 # 音をオン(50%デューティサイクル)
print("音を再生中...")
time.sleep(0.5) # 0.5秒間音を鳴らす
pwm.duty_cycle = 0 # 音をオフ
print("音を停止中...")
time.sleep(0.5) # 0.5秒間音を止めるプログラムの説明
- PWMの設定:
pwmio.PWMOutを使用して、GP26ピンにPWM信号を生成します。frequency=440で周波数を440Hz(A音)に設定しています。duty_cycleの値を変更してスピーカーのオン・オフを制御します。32768は50%のデューティサイクルで音を再生します。0はデューティサイクルがゼロで音を停止します。
- 0.5秒間隔のオン・オフ制御:
time.sleep(0.5)を使用して、音を0.5秒間再生し、次の0.5秒間音を止める動作を繰り返します。
- スピーカーの接続:
- スピーカーの片方をGP26に接続し、もう片方をGNDに接続してください。
このプログラムで、スピーカーから440Hzの音が0.5秒間隔でオンとオフを繰り返す動作を確認できます。他にカスタマイズしたい機能や質問があれば教えてください!✨💡
1秒間の間に周波数を300Hzから3000Hzまで変化させて鳴らして。以下は、1秒間の間にスピーカーから300Hzから3000Hzまで周波数を変化させながら音を鳴らすCircuitPythonのプログラムです。
プログラムコード
import time
import pwmio
import board
# PWMのセットアップ(GP26に接続されたスピーカー)
pwm = pwmio.PWMOut(board.GP26, duty_cycle=32768, frequency=300) # 初期周波数300Hz
print("300Hzから3000Hzまで周波数を変化させながら音を鳴らします。")
while True:
start_time = time.monotonic() # 現在時刻を記録
while time.monotonic() - start_time < 1.0: # 1秒間ループ
elapsed_time = time.monotonic() - start_time
frequency = 300 + int(2700 * elapsed_time) # 周波数を300Hzから3000Hzに変化
pwm.frequency = frequency # 周波数を更新
print(f"周波数: {frequency}Hz") # 現在の周波数を出力
time.sleep(0.01) # 10msごとに更新プログラムの説明
- PWMの初期設定:
pwmio.PWMOutを使用してGP26ピンでPWM信号を生成。- 初期周波数は300Hzに設定し、
duty_cycle=32768(50%デューティサイクル)で音を鳴らします。
- 周波数の変化:
- 1秒間で300Hzから3000Hzまで連続的に周波数を変化させます。
- 時間経過に基づき、周波数を300Hz + 変化量(2700Hz)で動的に計算します。
- 時間の計測:
time.monotonic()を使用してプログラムの実行時間を計測。- 1秒間だけループを実行し、その間に周波数を更新します。
- スピーカー接続:
- スピーカーの片方をGP26に接続し、もう片方をGNDに接続します。
- 更新間隔:
- 周波数は0.01秒(10ms)ごとに更新され、滑らかに変化します。
結果
このプログラムを実行すると、スピーカーから1秒間に300Hzから3000Hzまでの音が連続的に鳴ることを確認できます。音の変化速度や範囲を変更したい場合は、周波数計算式やループ条件を調整してください。
さらにカスタマイズが必要であれば、ぜひ教えてください!✨💡
variable_frequency=Trueを使用すべきでは?おっしゃる通り、variable_frequency=Trueを使用することで、PWM信号の周波数を動的に変更する機能が可能になります。このオプションを有効化することで、すでに作成されたPWMOutインスタンスの周波数を直接変更できるようになります。以下はvariable_frequency=Trueを利用した修正版のプログラムです。
修正版プログラム
import time
import board
import pwmio
# PWMのセットアップ(GP26に接続されたスピーカー)
pwm = pwmio.PWMOut(board.GP26, duty_cycle=32768, frequency=300, variable_frequency=True)
print("300Hzから3000Hzまで周波数を変化させながら音を鳴らします。")
while True:
start_time = time.monotonic() # 現在時刻を記録
while time.monotonic() - start_time < 1.0: # 1秒間ループ
elapsed_time = time.monotonic() - start_time
frequency = 300 + int(2700 * elapsed_time) # 周波数を300Hzから3000Hzに変化
pwm.frequency = frequency # 周波数を動的に更新
print(f"周波数: {frequency}Hz") # 現在の周波数を出力
time.sleep(0.01) # 10msごとに更新変更点の説明
variable_frequency=Trueの使用:
- PWMインスタンス作成時に
variable_frequency=Trueを指定しています。これにより、PWMOutインスタンスの周波数を動的に変更可能になりました。
- 周波数の動的更新:
pwm.frequencyを直接変更することで、音の周波数をリアルタイムに更新しています。これにより、300Hzから3000Hzへのスムーズな周波数変化が実現されます。
- 滑らかな周波数変化:
- 周波数は1秒間で300Hzから3000Hzまで線形に変化するように計算され、約10ms間隔で更新されます。
スピーカーの接続
- スピーカーの信号線をGP26に接続。
- スピーカーのもう一端をGNDに接続します。
結果
このプログラムを実行することで、スピーカーが300Hzから3000Hzまでスムーズに周波数を変化させながら音を鳴らすことが可能です。variable_frequency=Trueを活用することで、より効率的に周波数変更が行えます。さらに調整が必要であれば教えてください!✨💡
音の周波数を変える処理が少しわかりにくいので、単純に0.01秒ごとに50Hz増加させる処理に変更して。以下は、音の周波数を単純に0.01秒ごとに50Hzずつ増加させるように修正したプログラムです。処理を簡潔にし、より明確で直感的に操作できるようにしました。
修正版プログラム
import time
import board
import pwmio
# PWMのセットアップ(GP26に接続されたスピーカー)
pwm = pwmio.PWMOut(board.GP26, duty_cycle=32768, frequency=300, variable_frequency=True)
print("300Hzから3000Hzまで、0.01秒ごとに50Hz増加させながら音を鳴らします。")
while True:
frequency = 300 # 初期周波数を300Hzに設定
while frequency <= 3000: # 300Hzから3000Hzまで増加
pwm.frequency = frequency # 周波数を設定
print(f"現在の周波数: {frequency}Hz") # 現在の周波数を表示
frequency += 50 # 周波数を50Hzずつ増加
time.sleep(0.01) # 0.01秒ごとに更新変更点の説明
- 周波数の増加:
- 初期周波数を300Hzに設定し、
frequency += 50で50Hzずつ増加します。 - 増加範囲は3000Hzまでとなっています。
- 更新間隔:
time.sleep(0.01)で0.01秒ごとに周波数を変更し、スムーズでタイムリーな音の変化を実現しました。
- 簡潔なロジック:
- 周波数操作の処理を単純化し、動作が直感的でわかりやすいコードにしました。
スピーカーの接続
- GP26にスピーカーの信号線を接続。
- スピーカーのもう一端をGNDに接続。
動作の結果
このプログラムでは、スピーカーが300Hzから3000Hzまで50Hzずつ増加しながら音を鳴らします。音の変化を滑らかにすることで、実際に聞こえるトーンが心地よく感じられるはずです。
さらに調整が必要であれば、ぜひ教えてください!✨💡
カエルの歌を演奏するプログラムを作って。以下は、RP2040とCircuitPythonを使用して「カエルの歌」をスピーカーで演奏するプログラム例です。このプログラムでは、楽譜の各音符をPWMで制御し、スピーカーに音を出力します。
プログラムコード
import time
import board
import pwmio
# PWMのセットアップ(GP26に接続されたスピーカー)
pwm = pwmio.PWMOut(board.GP26, duty_cycle=0, frequency=440)
# 音符の周波数 (単位: Hz)
NOTES = {
"C4": 261,
"D4": 294,
"E4": 329,
"F4": 349,
"G4": 392,
"A4": 440,
"B4": 493,
"C5": 523,
"REST": 0 # 休符
}
# 「カエルの歌」の楽譜 (音符と長さの組み合わせ)
# 長さは秒単位で指定
SONG = [
("C4", 0.5), ("D4", 0.5), ("E4", 0.5), ("F4", 0.5),
("E4", 0.5), ("D4", 0.5), ("C4", 0.5), ("REST", 0.5),
("E4", 0.5), ("F4", 0.5), ("G4", 0.5), ("A4", 0.5),
("G4", 0.5), ("F4", 0.5), ("E4", 0.5), ("REST", 0.5)
]
def play_tone(frequency, duration):
"""指定した周波数で一定時間音を鳴らす関数"""
if frequency == 0: # 休符の場合
pwm.duty_cycle = 0 # 音を停止
else:
pwm.frequency = frequency
pwm.duty_cycle = 32768 # 50%デューティサイクルで音を鳴らす
time.sleep(duration)
pwm.duty_cycle = 0 # 音を停止
print("カエルの歌を演奏します。")
while True:
for note, length in SONG:
print(f"再生中: {note}, 長さ: {length}s")
play_tone(NOTES[note], length) # 音符と長さを再生
time.sleep(1) # ループ間に1秒間の休止プログラムの説明
- PWMの設定:
- GP26をPWMピンとして使用し、スピーカーに音を出力します。
- PWMの
frequencyで音の周波数を設定し、duty_cycleで音量を調整します(50%デューティサイクルを使用)。
- 楽譜の定義:
NOTESに音符とその周波数を定義します。SONGに「カエルの歌」の音符とその長さを組み合わせて定義しています。
- 音の再生:
play_tone()関数を使用して、指定した周波数と長さで音を鳴らします。- 休符の場合は
frequency=0として音を停止させます。
- ループ再生:
- 楽譜をループで繰り返し再生します。
接続方法
- スピーカー接続:
- スピーカーの信号線をGP26ピンに接続。
- もう一端をGNDに接続。
このプログラムで「カエルの歌」がスピーカーから再生されます。演奏速度や音程を変更したい場合は、楽譜や音符定義を調整してください!他にご希望があれば教えてください✨🎶
これもvariable_frequencyが抜けている。確かにその通りです!PWMOutクラスで周波数を動的に変更するためには、variable_frequency=Trueを設定する必要があります。この設定が抜けている場合、周波数の変更は適切に動作しません。以下は修正版のプログラムです。
修正版プログラム
import time
import board
import pwmio
# PWMのセットアップ(GP26に接続されたスピーカー)
pwm = pwmio.PWMOut(board.GP26, duty_cycle=32768, frequency=300, variable_frequency=True)
# 音符の周波数 (単位: Hz)
NOTES = {
"C4": 261,
"D4": 294,
"E4": 329,
"F4": 349,
"G4": 392,
"A4": 440,
"B4": 493,
"C5": 523,
"REST": 0 # 休符
}
# 「カエルの歌」の楽譜 (音符と長さの組み合わせ)
# 長さは秒単位で指定
SONG = [
("C4", 0.5), ("D4", 0.5), ("E4", 0.5), ("F4", 0.5),
("E4", 0.5), ("D4", 0.5), ("C4", 0.5), ("REST", 0.5),
("E4", 0.5), ("F4", 0.5), ("G4", 0.5), ("A4", 0.5),
("G4", 0.5), ("F4", 0.5), ("E4", 0.5), ("REST", 0.5)
]
def play_tone(frequency, duration):
"""指定した周波数で一定時間音を鳴らす関数"""
if frequency == 0: # 休符の場合
pwm.duty_cycle = 0 # 音を停止
else:
pwm.frequency = frequency # 周波数を設定
pwm.duty_cycle = 32768 # 50%デューティサイクルで音を鳴らす
time.sleep(duration)
pwm.duty_cycle = 0 # 音を停止
print("カエルの歌を演奏します。")
while True:
for note, length in SONG:
print(f"再生中: {note}, 長さ: {length}s")
play_tone(NOTES[note], length) # 音符と長さを再生
time.sleep(1) # ループ間に1秒間の休止変更点の説明
variable_frequency=Trueの追加:
- PWMインスタンス作成時に
variable_frequency=Trueを指定しました。これにより、音符ごとに周波数を動的に変更できるようになりました。
- 音符の再生:
- 楽譜に従い、指定された周波数で音を再生し、休符の場合は
pwm.duty_cycle=0で音を停止します。
動作の結果
このプログラムを実行すると、スピーカーから「カエルの歌」を演奏できます。音符ごとに周波数がスムーズに変更され、休符も正しく処理されます。さらに調整が必要であれば教えてください!✨🎶
simpleio.tone()を使って書き換えられる?はい、simpleio.tone()を使うことで「カエルの歌」を簡単に演奏するコードに書き換えることが可能です。simpleio.tone()は指定した周波数の音を指定したピンで一定時間鳴らすシンプルな関数で、PWMの詳細な設定を自動的に処理してくれます。
以下に、simpleio.tone()を使用したコードを示します。
修正版プログラム
import time
import board
from simpleio import tone
# 音符の周波数 (単位: Hz)
NOTES = {
"C4": 261,
"D4": 294,
"E4": 329,
"F4": 349,
"G4": 392,
"A4": 440,
"B4": 493,
"C5": 523,
"REST": 0 # 休符
}
# 「カエルの歌」の楽譜 (音符と長さの組み合わせ)
# 長さは秒単位で指定
SONG = [
("C4", 0.5), ("D4", 0.5), ("E4", 0.5), ("F4", 0.5),
("E4", 0.5), ("D4", 0.5), ("C4", 0.5), ("REST", 0.5),
("E4", 0.5), ("F4", 0.5), ("G4", 0.5), ("A4", 0.5),
("G4", 0.5), ("F4", 0.5), ("E4", 0.5), ("REST", 0.5)
]
print("カエルの歌を演奏します。")
# 楽譜を演奏
while True:
for note, length in SONG:
if NOTES[note] == 0: # 休符の場合
print(f"休符: {length}s")
time.sleep(length)
else:
print(f"再生中: {note}, 長さ: {length}s")
tone(board.GP26, NOTES[note], int(length * 1000)) # 周波数と長さを指定 (ms単位)
time.sleep(1) # 演奏間に1秒の休止プログラムの説明
simpleio.tone()の使用:
tone(pin, frequency, duration)関数を使用して音を鳴らします。pinは出力ピン(今回はboard.GP26)。frequencyは音の周波数。durationは音を鳴らす時間(ミリ秒単位)。
- 楽譜の処理:
SONGリストに音符と長さを定義。- 音符ごとに
tone()を呼び出して再生します。 - 休符の場合は
time.sleep()で指定した時間だけ待機します。
- ループ再生:
- 楽譜を繰り返し演奏します。
接続方法
- スピーカーの信号線をGP26に接続。
- スピーカーのもう一端をGNDに接続。
このコードでは、simpleio.tone()を活用することでコードの複雑さを軽減しつつ、簡単に音を鳴らすことができます。演奏速度や音程を変更したい場合は、楽譜データや周波数テーブルを調整してください!🎶✨
durationは秒単位じゃない?その通りです!simpleio.tone()で使用するdurationは秒単位です。先ほどのコードでは誤ってミリ秒として記述していました。以下に修正版のコードを示します。
修正版プログラム
import time
import board
from simpleio import tone
# 音符の周波数 (単位: Hz)
NOTES = {
"C4": 261,
"D4": 294,
"E4": 329,
"F4": 349,
"G4": 392,
"A4": 440,
"B4": 493,
"C5": 523,
"REST": 0 # 休符
}
# 「カエルの歌」の楽譜 (音符と長さの組み合わせ)
# 長さは秒単位で指定
SONG = [
("C4", 0.5), ("D4", 0.5), ("E4", 0.5), ("F4", 0.5),
("E4", 0.5), ("D4", 0.5), ("C4", 0.5), ("REST", 0.5),
("E4", 0.5), ("F4", 0.5), ("G4", 0.5), ("A4", 0.5),
("G4", 0.5), ("F4", 0.5), ("E4", 0.5), ("REST", 0.5)
]
print("カエルの歌を演奏します。")
# 楽譜を演奏
while True:
for note, length in SONG:
if NOTES[note] == 0: # 休符の場合
print(f"休符: {length}s")
time.sleep(length) # 秒単位の休符
else:
print(f"再生中: {note}, 長さ: {length}s")
tone(board.GP26, NOTES[note], length) # 周波数と長さを指定 (秒単位)
time.sleep(1) # 演奏間に1秒の休止修正点の説明
durationを秒単位に変更:
tone(board.GP26, NOTES[note], length)のlengthを秒単位で指定しました。- これにより、指定した音符の長さを正しく演奏できます。
- 休符の処理:
- 音符が
"REST"の場合はtime.sleep(length)を使用して休符の時間を確保します。
- 他の部分は維持:
- 周波数の定義と楽譜の構造はそのままにして、より簡潔で明確なコードにしました。
動作の結果
このプログラムを実行すると、スピーカーが「カエルの歌」を正確に演奏します。音符の長さを秒単位で設定しているため、聞こえるリズムが正確になります。
可愛い音だね、他のシンプルな曲のプログラムは作れる。ありがとう!そう言ってもらえてうれしいです。もちろん、他のシンプルな曲を演奏するプログラムも作れますよ。例えば、「キラキラ星」のような親しみやすい曲をプログラムしてみます。
キラキラ星のプログラムコード
import time
import board
from simpleio import tone
# 音符の周波数 (Hz)
NOTES = {
"C4": 262,
"D4": 294,
"E4": 330,
"F4": 349,
"G4": 392,
"A4": 440,
"B4": 494,
"C5": 523,
"REST": 0 # 休符
}
# 「キラキラ星」の楽譜 (音符と長さのペア)
# 長さは秒単位
SONG = [
("C4", 0.5), ("C4", 0.5), ("G4", 0.5), ("G4", 0.5),
("A4", 0.5), ("A4", 0.5), ("G4", 1.0), ("F4", 0.5),
("F4", 0.5), ("E4", 0.5), ("E4", 0.5), ("D4", 0.5),
("D4", 0.5), ("C4", 1.0)
]
print("キラキラ星を演奏します。")
# 楽譜を順番に再生
while True:
for note, duration in SONG:
if NOTES[note] == 0: # 休符の場合
time.sleep(duration)
else:
tone(board.GP26, NOTES[note], duration) # 音を鳴らす
time.sleep(1) # ループ間に1秒休止説明
- 音符の定義:
NOTES辞書に音符(C4など)とその周波数を対応付けています。
- 楽譜の設定:
SONGリストに「キラキラ星」の音符と長さ(秒単位)を順番に記述しています。
- 演奏の仕組み:
tone()関数でスピーカーから指定した音を鳴らします。"REST"を指定すると休符として休止します。
- スピーカー接続:
- GP26ピンにスピーカーを接続し、もう一端をGNDに接続してください。
このコードを動かすと、スピーカーから「キラキラ星」のメロディが流れるはずです。
I2Cとセンサー
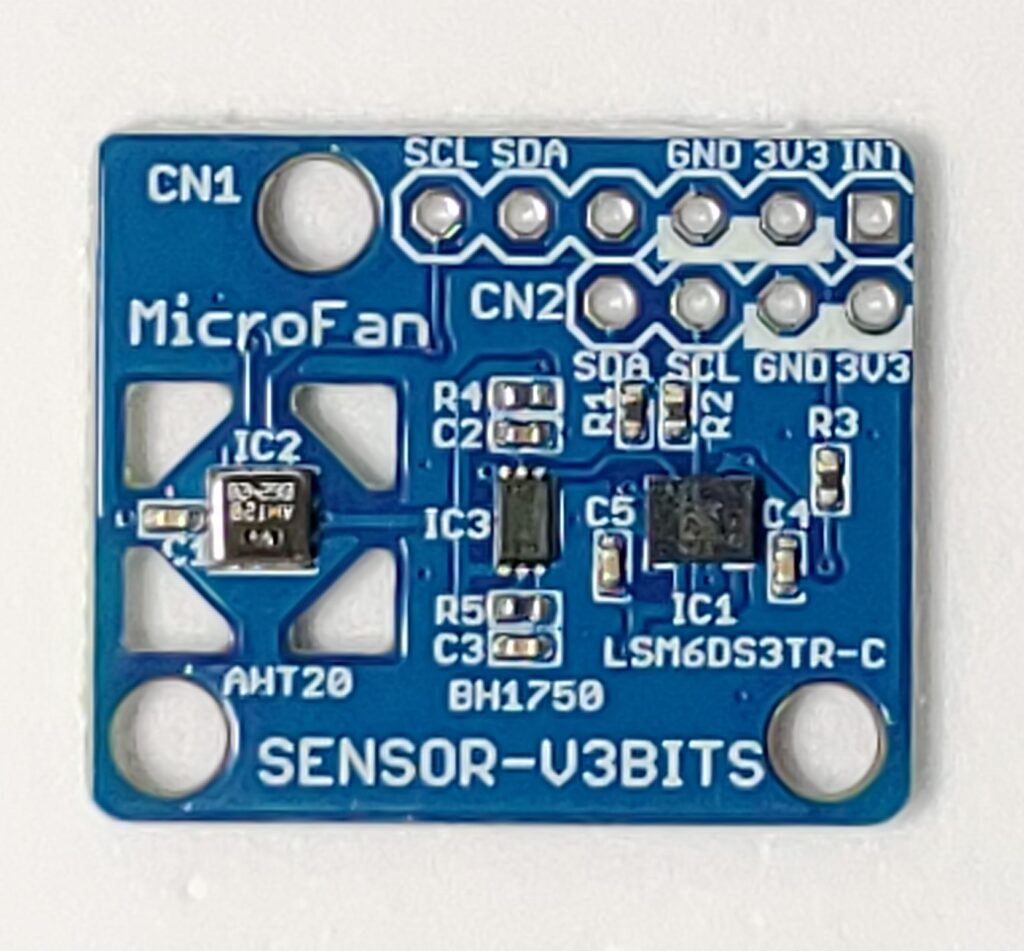
よく利用される温度・湿度、照度、加速度・ジャイロセンサーをひとまとめにしたSENSOR-3VBITSをRP2040-UNO-R2に接続したプログラム例を示します。
I2C0(GP21,GP20)にSENSOR-3VBITSを接続して実行。
I2Cのデバイスをスキャンして。SCL=GP21,SDA=GP20を使用。RP2040とCircuitPythonを使用して、SCL(GP21)とSDA(GP20)ピンを用いてI2Cデバイスをスキャンするプログラムを以下に示します。このコードを実行すると、接続されているI2Cデバイスのアドレスを確認できます。
プログラムコード
import board
import busio
# I2Cのセットアップ(SCL=GP21, SDA=GP20)
i2c = busio.I2C(scl=board.GP21, sda=board.GP20)
# I2Cデバイスをスキャン
print("I2Cスキャンを開始します...")
while not i2c.try_lock(): # I2Cのロックを取得するまで待機
pass
try:
devices = i2c.scan() # 接続されているデバイスのアドレスを取得
if devices:
print("検出されたI2Cデバイスのアドレス:")
for device in devices:
print(f" - 0x{device:02X}") # アドレスを16進数で表示
else:
print("I2Cデバイスが見つかりませんでした。")
finally:
i2c.unlock() # I2Cロックを解放
print("スキャン完了。")プログラムの説明
- I2Cのセットアップ:
busio.I2Cクラスを使用してI2C通信を初期化します。- SCLピン(GP21)とSDAピン(GP20)を指定します。
- I2Cスキャン:
i2c.scan()メソッドを使用して、バスに接続されているすべてのI2Cデバイスのアドレスを取得します。- アドレスは10進数で取得されますが、
0x形式の16進数に変換して表示しています。
- ロックの制御:
- I2Cバスはマルチタスク環境で競合しないように、ロックを取得してアクセスします。
- 使用後に必ず
i2c.unlock()でロックを解放します。
- エラーハンドリング:
- スキャン中にエラーが発生しないように
try/finallyでロックの解放を保証しています。
結果
このプログラムを実行すると、接続されているI2Cデバイスが検出され、以下のような出力が得られます。
I2Cスキャンを開始します...
検出されたI2Cデバイスのアドレス:
- 0x23
- 0x38
- 0x6A
スキャン完了。I2Cデバイスが見つからない場合は、「I2Cデバイスが見つかりませんでした。」というメッセージが表示されます。
必要に応じて、このコードをさらに拡張することも可能です。追加の質問やカスタマイズの要望があれば教えてください!✨💡
0x23,0x38,0x6Aのデバイスを推定して。以下は、I2Cアドレスに基づいて推定されるデバイスの例です:
- 0x23:
- 一般的に、BH1750というデジタル光センサー(照度センサー)に対応します。このセンサーは、周囲の光の強さを測定するために使用されます。
- 0x38:
- CAP1188などの静電容量式タッチセンサーICが該当する場合があります。また、他のタッチセンサーや環境センサーもこのアドレスを使用することがあります。
- 0x6A:
- LSM6DS3やLSM6DSOXといったSTMicroelectronics製の6軸IMU(加速度センサー+ジャイロセンサー)に対応することが多いです。これらはモーションセンサーとして使用されます。
注意点
- 上記の推定は一般的なI2Cアドレスの使用例に基づいています。実際のデバイスを特定するには、デバイスのデータシートや製品仕様を確認する必要があります。
- I2Cスキャンで得られたアドレスが複数のデバイスに対応する場合もあるため、接続されているデバイスの種類や用途を考慮してください。
さらに詳しい情報が必要であれば、デバイスのデータシートを確認するか、教えていただければサポートします!✨💡
残念、0x38にはAHT20が接続されている。AHT20で気温と湿度を測り、CPUの温度と共に1秒ごとに出力して。以下に、RP2040を使用してAHT20センサーから気温と湿度を測定し、同時にRP2040のCPU温度を取得して1秒ごとに出力するプログラムを記述しました。
プログラムコード
import time
import board
import adafruit_ahtx0
import microcontroller
# I2Cのセットアップ(SCL=GP21, SDA=GP20)
i2c = board.I2C()
# AHT20センサーのセットアップ
aht20 = adafruit_ahtx0.AHTx0(i2c)
print("気温・湿度・CPU温度を測定します。")
while True:
# AHT20から気温と湿度を取得
temperature = aht20.temperature # 気温 (単位: °C)
humidity = aht20.relative_humidity # 湿度 (単位: %)
# RP2040のCPU温度を取得
cpu_temperature = microcontroller.cpu.temperature # 単位: °C
# 結果を出力
print(f"AHT20: 気温={temperature:.2f}°C, 湿度={humidity:.2f}%")
print(f"CPU温度: {cpu_temperature:.2f}°C")
print("-" * 40)
time.sleep(1) # 1秒間隔で測定を繰り返すプログラムの説明
- I2Cの初期化:
board.I2C()を使用してI2C通信をセットアップ。- SCLピン(GP21)とSDAピン(GP20)を使用します。
- AHT20センサーの設定:
adafruit_ahtx0ライブラリを使用してAHT20を初期化。temperatureプロパティで気温(℃)、relative_humidityプロパティで湿度(%)を取得します。
- CPU温度の取得:
microcontroller.cpu.temperatureを使用してRP2040のCPU温度を取得します。
- 測定結果の出力:
- 気温、湿度、CPU温度を1秒ごとにコンソールに出力します。
- 結果は小数点以下2桁で表示します。
- 測定間隔:
time.sleep(1)で1秒間隔で測定を繰り返します。
必要なライブラリ
- Adafruit CircuitPythonライブラリバンドル:
- 必要なライブラリ(
adafruit_ahtx0)をバンドルから取得し、「CIRCUITPY」ドライブ内のlibフォルダにコピーしてください。
このコードを使用すれば、AHT20センサーから気温と湿度を測定し、RP2040のCPU温度を1秒ごとに取得して出力することができます。さらに調整や質問があれば教えてください!✨💡
I2Cはbusioライブラリだよね。そうですね、I2C通信を扱う場合、CircuitPythonではbusioライブラリを使用します。先ほどのコードで、I2Cのセットアップ部分を修正すると、次のようになります。
修正版プログラム
import time
import board
import busio # busioライブラリをインポート
import adafruit_ahtx0
import microcontroller
# I2Cのセットアップ(SCL=GP21, SDA=GP20)
i2c = busio.I2C(scl=board.GP21, sda=board.GP20)
# AHT20センサーのセットアップ
aht20 = adafruit_ahtx0.AHTx0(i2c)
print("気温・湿度・CPU温度を測定します。")
while True:
# AHT20から気温と湿度を取得
temperature = aht20.temperature # 気温 (単位: °C)
humidity = aht20.relative_humidity # 湿度 (単位: %)
# RP2040のCPU温度を取得
cpu_temperature = microcontroller.cpu.temperature # 単位: °C
# 結果を出力
print(f"AHT20: 気温={temperature:.2f}°C, 湿度={humidity:.2f}%")
print(f"CPU温度: {cpu_temperature:.2f}°C")
print("-" * 40)
time.sleep(1) # 1秒間隔で測定を繰り返す変更点
- I2Cの初期化:
busio.I2Cを使用してI2C通信をセットアップしました。- SCLピンに
GP21、SDAピンにGP20を指定しています。
これで、正確にI2C通信を設定し、AHT20センサーから気温と湿度を取得できるようになります。補足や追加が必要であれば教えてください!✨💡
BH1750で計測した照度も追加して。以下は、BH1750センサーを使用して照度(明るさ)を測定し、AHT20センサーの気温・湿度とRP2040のCPU温度を1秒ごとに出力するプログラムです。
プログラムコード
import time
import board
import busio
import adafruit_ahtx0
import adafruit_bh1750
import microcontroller
# I2Cのセットアップ(SCL=GP21, SDA=GP20)
i2c = busio.I2C(scl=board.GP21, sda=board.GP20)
# AHT20センサーのセットアップ
aht20 = adafruit_ahtx0.AHTx0(i2c)
# BH1750センサーのセットアップ
bh1750 = adafruit_bh1750.BH1750(i2c)
print("気温・湿度・CPU温度・照度を測定します。")
while True:
# AHT20から気温と湿度を取得
temperature = aht20.temperature # 気温 (単位: °C)
humidity = aht20.relative_humidity # 湿度 (単位: %)
# BH1750から照度を取得
illuminance = bh1750.lux # 照度 (単位: ルクス)
# RP2040のCPU温度を取得
cpu_temperature = microcontroller.cpu.temperature # 単位: °C
# 結果を出力
print(f"AHT20: 気温={temperature:.2f}°C, 湿度={humidity:.2f}%")
print(f"BH1750: 照度={illuminance:.2f}ルクス")
print(f"CPU温度: {cpu_temperature:.2f}°C")
print("-" * 40)
time.sleep(1) # 1秒間隔で測定を繰り返すプログラムの説明
- I2Cの初期化:
busio.I2Cを使用してI2Cバス通信をセットアップします(SCL=GP21, SDA=GP20)。
- センサーの設定:
- AHT20センサー:
adafruit_ahtx0ライブラリで初期化し、気温と湿度を測定します。
- BH1750センサー:
adafruit_bh1750ライブラリで初期化し、照度を測定します。
- CPU温度の取得:
microcontroller.cpu.temperatureを使用してRP2040のCPU温度を取得します。
- データ出力:
- 各センサーから取得したデータ(気温、湿度、照度)とCPU温度を1秒ごとにコンソールに出力します。
必要なライブラリ
- Adafruit CircuitPythonライブラリバンドル:
- 必要なライブラリを以下からダウンロードし、「CIRCUITPY」ドライブの
libフォルダに追加します。adafruit_ahtx0adafruit_bh1750
結果の例
プログラムを実行すると以下のような結果が得られます:
AHT20: 気温=24.53°C, 湿度=45.67%
BH1750: 照度=234.56ルクス
CPU温度: 32.18°C
----------------------------------------これで気温、湿度、照度、CPU温度を同時に測定し出力できます!追加の要望や質問があれば教えてください!✨💡
AHT20とBH1750のスペックと特徴を教えて。以下に、AHT20とBH1750のスペックと特徴をまとめました。
AHT20のスペックと特徴
- タイプ: 温湿度センサー
- 通信プロトコル: I2C
- 動作範囲:
- 温度: -40°C ~ 85°C
- 湿度: 0% ~ 100% RH
- 精度:
- 温度: ±0.3°C
- 湿度: ±2% RH
- 電源電圧: 2.0V ~ 5.5V(典型値: 3.3V)
- サイズ: 3×3×1 mm(小型SMDパッケージ)
- 特徴:
- 高精度で信頼性の高い温湿度測定
- デジタル出力(I2Cインターフェース)
- 長期安定性に優れる
- 低消費電力でエネルギー効率が高い
- 環境モニタリング、HVAC、家庭用電化製品などに適用可能
BH1750のスペックと特徴
- タイプ: 照度センサー(デジタルアンビエントライトセンサー)
- 通信プロトコル: I2C
- 測定範囲: 1 ~ 65535ルクス
- 精度: ±20%
- 電源電圧: 2.4V ~ 3.6V(典型値: 3.0V)
- 消費電流: 0.12mA(低消費電力)
- 特徴:
- 人間の目に近いスペクトル応答特性
- 内蔵A/Dコンバータにより、アナログ照度をデジタル値に変換
- 赤外線の影響が少なく、安定した測定が可能
- 小型で軽量、LCDバックライト制御や自動車のヘッドライト制御に適用可能
これらのセンサーはどちらもI2C通信を使用し、RP2040などのマイクロコントローラと簡単に統合できます。AHT20は温湿度測定に、BH1750は照度測定に特化しており、環境モニタリングやスマートデバイスの開発に最適です。
さらに詳しい情報が必要であれば教えてください!✨💡
0x6Aは、LSM6DS3TR-Cです。LSM6DS3TRCで3軸の加速度を取得し、1秒間隔で出力して。以下に、LSM6DS3TR-Cセンサーを使用して3軸の加速度を取得し、1秒間隔で出力するCircuitPythonのプログラムを示します。
プログラムコード
import time
import board
import busio
from adafruit_lsm6ds.lsm6ds3trc import LSM6DS3TRC
# I2Cのセットアップ(SCL=GP21, SDA=GP20)
i2c = busio.I2C(scl=board.GP21, sda=board.GP20)
# LSM6DS3TR-Cセンサーのセットアップ
sensor = LSM6DS3TRC(i2c)
print("LSM6DS3TR-Cから3軸加速度を測定します。")
while True:
# 加速度を取得
acceleration = sensor.acceleration # (x, y, z)タプルとして取得
# 結果を出力
print(f"加速度: X={acceleration[0]:.2f} m/s², Y={acceleration[1]:.2f} m/s², Z={acceleration[2]:.2f} m/s²")
print("-" * 40)
time.sleep(1) # 1秒間隔で測定を繰り返すプログラムの説明
- I2Cの初期化:
busio.I2Cを使用してI2C通信をセットアップ。SCLにGP21、SDAにGP20を指定しています。
- LSM6DS3TR-Cセンサーの設定:
LSM6DS3TRCクラスを使用してセンサーを初期化します。- 加速度値は
sensor.accelerationプロパティを使用して取得され、(x, y, z)の3軸の値がタプル形式で返されます。
- 加速度の出力:
- 各軸の加速度値を小数点以下2桁でフォーマットしてコンソールに出力します。
- 測定間隔:
time.sleep(1)を使用して、1秒間隔で加速度を測定し続けます。
必要なライブラリ
- Adafruit CircuitPythonライブラリバンドル:
- 必要なライブラリ(
adafruit_lsm6ds)をCircuitPythonライブラリバンドルから取得し、libフォルダにコピーしてください。
結果の例
プログラムを実行すると、以下のような結果がコンソールに表示されます:
加速度: X=0.12 m/s², Y=9.81 m/s², Z=-0.03 m/s²
----------------------------------------
加速度: X=0.10 m/s², Y=9.75 m/s², Z=-0.02 m/s²
----------------------------------------これで、LSM6DS3TR-Cセンサーから加速度を測定し、正確に出力するプログラムが完成します。他にご質問や調整が必要であれば教えてください!✨💡
取得した加速度を利用して、基板を立てた時の基板の水平面からの傾き角を表示して。以下は、基板を立てた際の水平面からの傾き角を、取得した加速度データを使用して計算・表示するプログラムです。このプログラムでは、3軸加速度を利用して基板の傾き角度をリアルタイムで測定します。
プログラムコード
import time
import board
import busio
import math
from adafruit_lsm6ds.lsm6ds3trc import LSM6DS3TRC
# I2Cのセットアップ(SCL=GP21, SDA=GP20)
i2c = busio.I2C(scl=board.GP21, sda=board.GP20)
# LSM6DS3TR-Cセンサーのセットアップ
sensor = LSM6DS3TRC(i2c)
print("基板の水平面からの傾き角度を測定します。")
while True:
# 加速度を取得 (x, y, z)
acceleration = sensor.acceleration
# 各軸の加速度
x = acceleration[0]
y = acceleration[1]
z = acceleration[2]
# 傾き角の計算 (3Dベクトルの角度)
angle = math.atan2(math.sqrt(x**2 + y**2), z) * 180 / math.pi
# 結果を出力
print(f"水平面からの傾き角度: {angle:.2f}°")
print("-" * 40)
time.sleep(1) # 1秒間隔で測定を繰り返すプログラムの説明
- 加速度の取得:
- センサーから3軸加速度データ
(x, y, z)を取得します。
- 傾き角の計算:
x軸とy軸の加速度を平方和で合成し、z軸を基準にして傾きを計算します。- 水平面からの角度を求めるために、
atan2関数を使用して3Dベクトルの傾きを算出し、ラジアンを度数に変換します。
- 結果の出力:
- 計算された傾き角をコンソールに小数点以下2桁まで表示します。
- 測定間隔:
- 1秒間隔でデータを更新するために
time.sleep(1)を使用します。
必要なライブラリ
- Adafruit CircuitPythonライブラリバンドル:
- 必要なライブラリ(
adafruit_lsm6ds)をCircuitPythonライブラリバンドルから取得し、「CIRCUITPY」ドライブのlibフォルダに追加してください。
結果の例
このプログラムを実行すると、以下のような出力が得られます:
水平面からの傾き角度: 28.45°
----------------------------------------
水平面からの傾き角度: 29.12°
----------------------------------------これにより、基板が水平面からどの程度傾いているかをリアルタイムで測定し確認できます。追加の調整や質問があれば、ぜひお知らせください!✨💡